In recent years, the intense growth in the use of unmanned aircraft systems (UAS), which consists of one or more unmanned aircraft and the necessary elements for their operations, has caused changes in the relations that the society, the government and the market have with the aerospace industry. According to forecasts from the Aerospace Industries Association (AIA) and Avascent, unmanned aircraft will generate US$ 150 billion, in total expenditures, by 2036 and annually hold up to 60,000 research and development (R&D), manufacturing and services jobs. Due to the need to integrate these systems into the airspace in a safe manner, sharing this and producing low risks for third parties on the ground and cooperative and non-cooperative aircraft in operation. The UAS must comply with a series of requirements that aim to mitigate risks through the use of new computational systems. Among them, there is the use of Detect and Avoid System (DAA), which aims to see, feel or detect conflicting traffic and/or other dangerous conditions and take appropriate protective measures.
This work presents the development of a system for UAS trajectory planning. This system will optimize the trajectories generated and ensure safe operation with other aircraft on-air and third parties on the ground. In the developed system, the global planner is responsible for defining a flight plan, between two points on the airspace, for the UAS. This flight plan will optimize the trajectory costs concerning risk factors, such as population density, weather conditions and operation under restricted and/or dangerous zones. Moreover, a local planner will have the function of avoiding the risks related to conflicting air traffic during the operation of the UAS. It will use a DAA system in order to detect and avoid intruder aircraft risk of collision by performing preventive maneuvers calculated in the system after the violation of previously defined protection volumes.
The results of this project are shown in the next subtopics:
Running DAIDALUS for a frontal collision between the ownership aircraft and an intruder aircraft.

Running the system considering costs of meteorological conditions, populational density and no-fly zones.

Running the system considering the costs and risks related to a collision with other aircraft and access to dangerous areas.
- Legend:
: Path planned
: Path executed by the UAS
: Ownership Aircraft
: Intruder Aircraft
-
: DAA bands
: No-fly zones
-
: Costs


In order to set up a machine to run the simulations, you will need to install and compile some code.
Firstly, you will need to install some general dependencies used by other components.
Run the following commands in your terminal:
$ pip install -r requeriments.txt
$ sudo apt-get install gcc python3-dev libxml2-dev libxslt-dev
$ sudo apt-get install libwebkitgtk-dev libjpeg-dev libtiff-dev libgtk2.0-dev libsdl1.2-dev freeglut3 freeglut3-dev libnotify-dev libgstreamerd-3-dev
$ sudo apt-get install python-wxgtk3.0
$ sudo apt install python-opencv
$ sudo apt install python3-opencv
$ pip3 install pymavlink
ICAROUS (Independent Configurable Architecture for Reliable Operations of Unmanned Systems) is a software architecture that enables the robust integration of mission-specific software modules and highly assured core software modules for building safety-centric autonomous unmanned aircraft applications. The set of core software modules includes formally verified algorithms that detect, monitor, and control conformance to safety criteria; avoid stationary obstacles and maintain a safe distance from other users of the airspace; and compute resolution and recovery maneuvers, autonomously executed by the autopilot, when safety criteria are violated or about to be violated. ICAROUS is implemented using the NASA's core Flight Systems (cFS) middleware. The aforementioned functionalities are implemented as cFS applications which interact via a publish/subscribe messaging service provided by the cFS Software Bus.
$ git clone --recursive https://github.com/nasa/icarous.git
$ cd icarous
$ bash UpdateModules.sh
$ make
$ make install
$ cd System/icarous/exe/cpu1
$ ./core-cpu1 -C 1 -I 0
For more details about ICAROUS read the User Guide (https://nasa.github.io/icarous/)
The code in this repository is released under NASA's Open Source Agreement.
César A. Muñoz (cesar.a.munoz@nasa.gov), NASA Langley Research Center.
PolyCARP (Algorithms and Software for Computations with Polygons) is a package of algorithms, implemented in Java, C++, and Python, for computing containment, collision, resolution, and recovery information for polygons. The intended applications of PolyCARP are related, but not limited, to safety-critical systems in air traffic management.
$ git clone --recursive https://github.com/nasa/PolyCARP.git
You need to add the PolyCarp python folder in PYTHONPATH to use it inside ICAROUS and MAVProxy.
$ export PYTHONPATH="System/PolyCARP/Python"
For technical information about the definitions and algorithms in this repository, visit http://shemesh.larc.nasa.gov/fm/PolyCARP.
The code in this repository is released under NASA's Open Source Agreement.
César A. Muñoz (cesar.a.munoz@nasa.gov), NASA Langley Research Center
WebGS is a web-based ground control station that is compatible with ICAROUS (versions greater than 2.1.19) and capable of multi-aircraft simulations
$ git clone --recursive https://github.com/nasa/webgs.git
- NodeJS and NPM
-
Download NodeJS and NPM (https://nodejs.org/en/)
$ curl -sL https://deb.nodesource.com/setup_14.x | sudo -E bash -$ sudo apt-get install -y nodejs -
Check if they were installed:
$ node -v & npm -v
-
$ cd webgs
$ ./install.sh
The simplest way:
$ python3 start_webgs.py -DEV True
See more options inside WebGS Repository (https://github.com/nasa/webgs).
The code in this repository is released under NASA's Open Source Agreement.
César A. Muñoz (cesar.a.munoz@nasa.gov), NASA Langley Research Center
Ardupilot is the most advanced, full-featured and reliable open source autopilot software available. It has been under development since 2010 by a team of diverse professional engineers and computer scientists. It is the only autopilot software capable of controlling almost any vehicle system imaginable, from conventional airplanes, multirotors, and helicopters, to boats and even submarines. And now being expanded to feature support for new emerging vehicle types such as quad-planes and compound helicopters.
$ git clone --recursive https://github.com/ArduPilot/ardupilot.git
$ cd System/icarous/Scripts
$ ./runSITL.sh
This is a MAVLink ground station written in python. Please see https://ardupilot.org/mavproxy/index.html for more information
Following some tips about ICAROUS communication, we need to use the release 1.8.20
$ git clone --recursive https://github.com/ArduPilot/MAVProxy.git
$ git checkout 6dd4a04
Use the script inside ICAROUS to install MAVProxy
$ cd System/icarous/Python/CustomModules
$ bash SetupMavProxy.sh System
$ cd System/icarous/Scripts
$ ./runGS.sh
The Aeronautical Command Meteorology Network (REDEMET) aims to integrate meteorological products aimed at civil and military aviation, aiming to make access to this information faster, more efficient and safer. The REDEMET API is a product of application programming interfaces (APIs), which provides access to various meteorological products, now available on the REDEMET website, quickly and safely to be used for various purposes.
$ git clone --recursive https://github.com/josuehfa/pyredemet.git
You need to create an account inside RedeMet(https://redemet.decea.gov.br/?i=integrador) and get an API there.
Direct Link Here:(https://redemet.decea.gov.br/index.php?i=ajuda)
OMPL (Open Motion Planning Library) is a software package for computing motion plans using sampling-based algorithms. The content of the library is limited to motion planning algorithms, which means there is no environment specification, no collision detection or visualization. This is intentional as the library is designed to be easily integrated into systems that already provide the additional needed components.
Make the script executable:
$ chmod u+x install-ompl-ubuntu.sh
Run the script to install OMPL with Python bindings.
$ ./install-ompl-ubuntu.sh --python
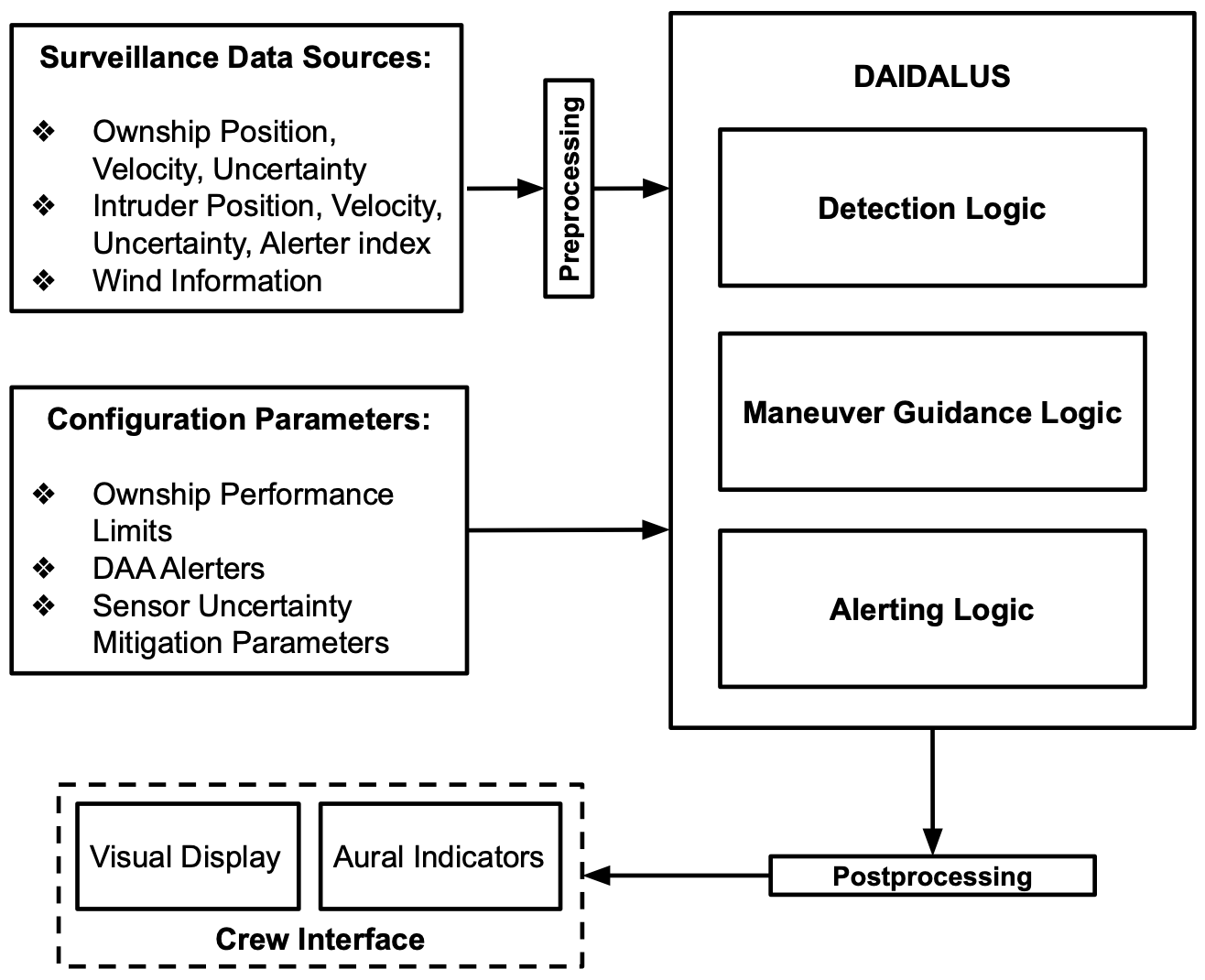
The local path planning is executed with the help of DAIDALUS, DAIDALUS return bands where the aircraft can go in order to avoid the risk of collision with other aircraft.
DAIDALUS encounter can be simulated in the visualization tool UASChorus.
In Windows/MAC OS systems, just download the file and double-click it. It assumes a Java Run Time environment, which is default in most systems. In a Linux box, go to a terminal and type
$ java jar UASChorus.jar
In UASChorus
Go to File/Open in the main menu and open any encounter file, e.g., name.daa.
By default, UASChorus is configured with a non-buffered well-clear volume (instantaneous bands). To load a different configuration, go to File/Load Configuration and load a configuration file, e.g., name.conf.
To step through the scenario, go to Window/Sequence Control Panel and click either the execute button (to reproduce the scenario) or linear to generate a 1s linear projection on the current state.
A simple example simulating an encounter with a traffic intruder and considering the cost of path (populational density, restricted areas and meteorological) is provided. To simulate and visualize an animation of the simulation, try the following script:
$ python3 RunOptimalSim.py
The above simulation produces a .json log file with the callsign of the vehicle (SPEEDBIRD). Use the VisualizeLog.py script to visualize the simulation.
$ python3 VisualizeLog.py <SPEEDBIRD_CREATED.json>
There two basics ways to create new traffic scenarios, from a file 'traffic.txt' or direct in the code. See the following explanation in order to create both:
To add new scenarios with differente intruders, create a 'traffic.txt' file with the following informations:
# id, range [m], bearing [deg], altitude [m], speed [m/s], heading [deg], climb rate [m/s]
1, 100, 80, 5, 2, 270, 0
2, 130, 90, 10, 4, 90, 0
To add an intruder aircraft inside the code, you need to use the funciton AddTraffic(self, idx, home, rng, brng, alt, speed, heading, crate, transmitter="GroundTruth"), the parameters of this function are described below:
- idx:
traffic vehicle id - home:
home position (lat [deg], lon [deg], alt [m]) - rng:
starting distance from home position [m] - brng:
starting bearing from home position [deg], 0 is North - alt:
starting altitude [m] - speed:
traffic speed [m/s] - heading:
traffic heading [deg], 0 is North - crate:
traffic climbrate [m/s] - transmitter:
A Transmitter to send V2V position data, ex: "ADS-B" or "GroundTruth"
An example to how to use is presetented in the following code:
#[id, range [m], bearing [deg], altitude [m], speed [m/s], heading [deg], climb rate [m/s]] tf = [1, 70, 80, 5, 5, 180, 0] sim.AddTraffic(tf[0], start_position, *tf[1:])
Please take a look at the following script. This is one way of using the pymavlink APIs to send/receive data to/from Icarous. This script imitates a ground station and essentially sends data to the ground station interface application in Icarous. The ground station port settings can be configured here gsInterface0.
If you are looking to send waypoints/geofences from an application running onboard instead of a ground station running offboard, you can implement your own cFS interface application application that will send/receive between your onboard application and Icarous. The internal message definitions for waypoints and geofences are here.
wp load /home/josuehfa/System/icarous/Scripts/flightplan4.txt
geofence load /home/josuehfa/System/icarous/Scripts/geofence2.xml
traffic load 46 107 5 0 100 0
long MISSION_START