This repository contains the code used during my master's research project. The following package-class diagram gives an overview of the organization of the project.

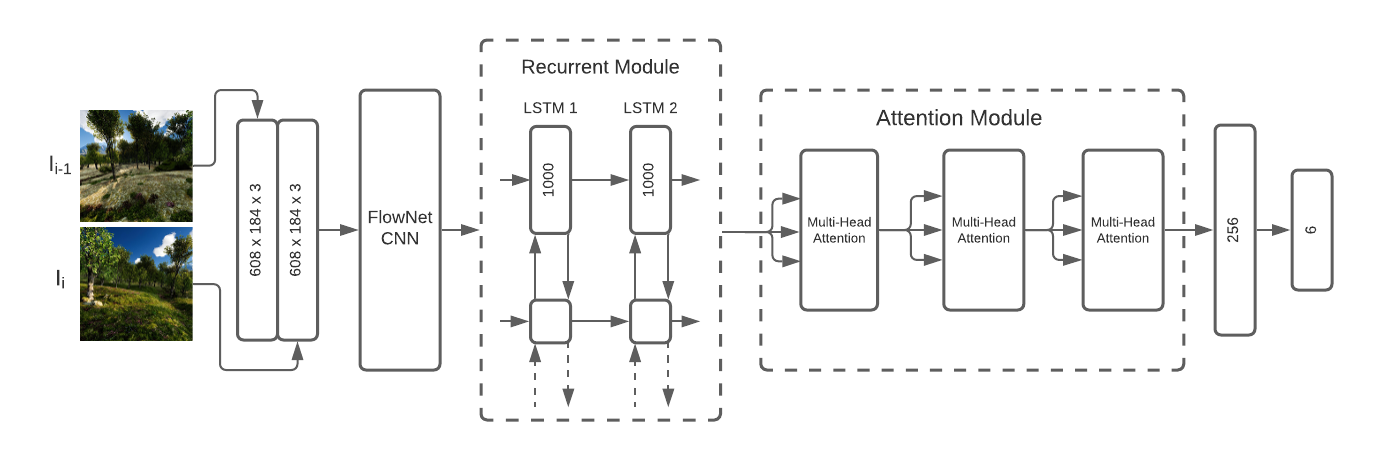
SelfAttentionVO, trained using an MSE-based loss, is the best performing model out of all the models tried during this research. It uses a multi-head attention module combined with an RCNN to estimate the visual odometry of a drone. The model takes 48% less time to trained compared to DeepVO and is 17% more accurate. It is also more robust to noisy inputs.
Full details of the design and results can be found in the Thesis, which is available upon request (will be made public later this spring).
(c) Copyright @olibd, 2021