Package with Aisoy related scripts.
===
To work with these scripts you are supposed to run them with your ROS_MASTER_URI environment variable pointing to your robot. E.g.:
export ROS_MASTER_URI=http://AISOY.CURRENT.IP.ADDRESS:11311
You can then run the nodes with:
rosrun aisoy_playground the_node_you_want_to_run
===
You'll find the scripts in the scripts folder:
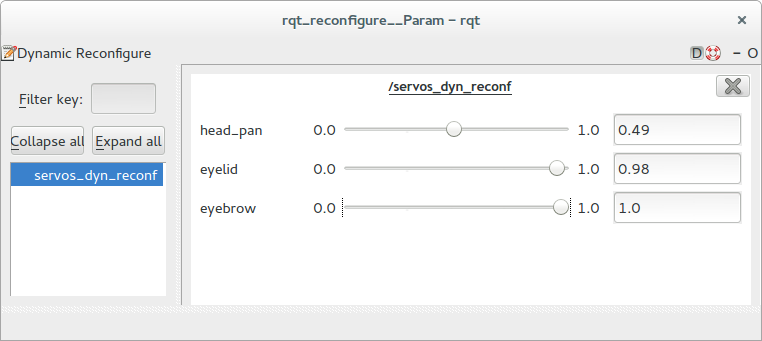
servos_dyn_rec.pycontains a dynamic reconfigure server to move the robot's servos (head pan, eyelids and eyebrows).
Use it with rqt_reconfigure:
rosrun rqt_reconfigure rqt_reconfigure
Choose servos_dyn_reconf and play with the scroll bars.