Что можно делать с помощью бота, без использования qGroundControl:
- Активировать стандартные режимы arm, disarm, land, takeoff
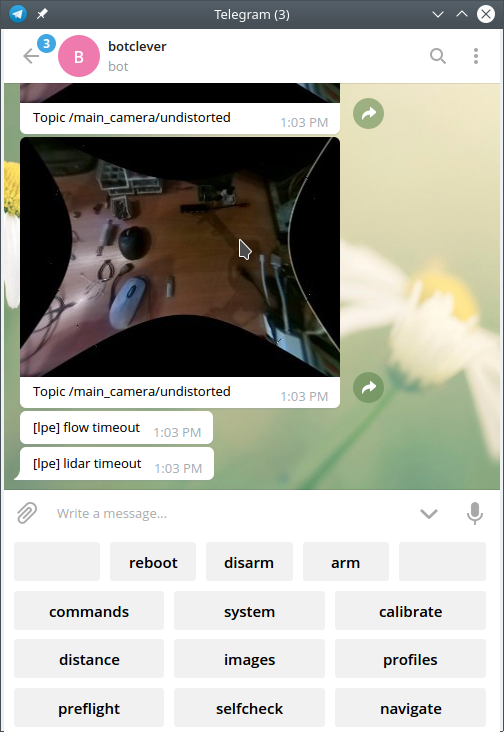
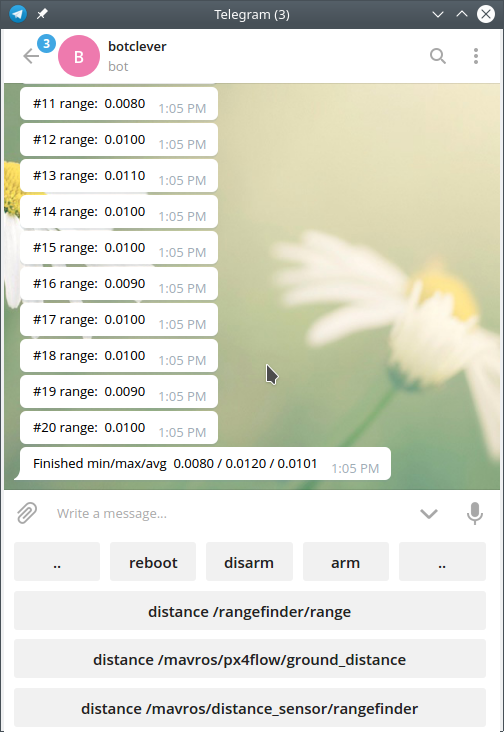
- Просматривать image, distance данные с топиков ROS.
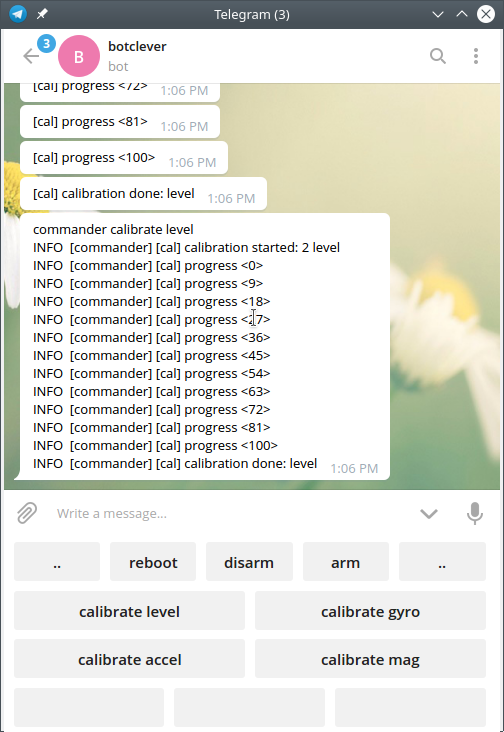
- Проводить калибровку level, gyro, accel.
- Вызывать selfcheck из пакета клевер и получать в телеграм его отчет.
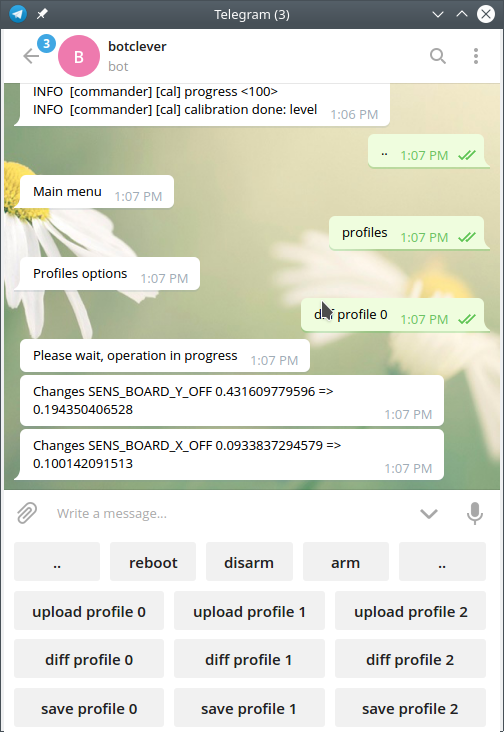
- Работа с профайлами, можно использовать сразу до 3х профайлов, для сохранения разных конфигураций FCU и быстрого переключения между ними, просмотра отличий в параметрах и сохранения.
- Прямой доступ к консоли mavlink полетного контроллера, позволит легко получить или изменить параметры полетного контроллера не предусмотренные ботом.
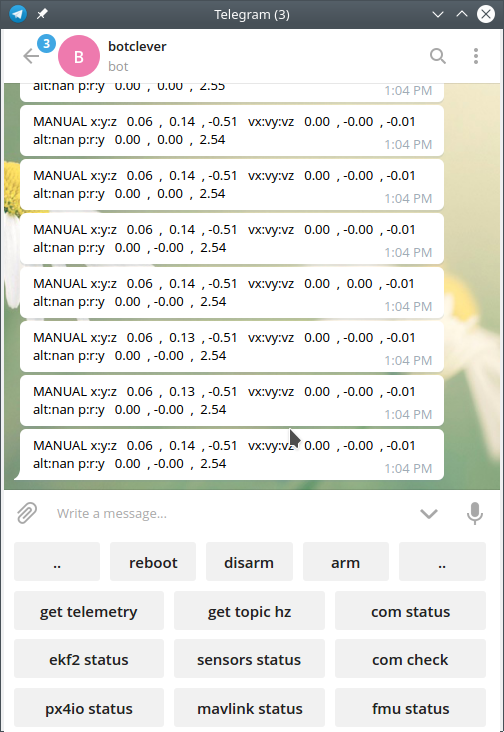
- Предполетный набор проверок, можно просмотреть hz парметры основной камеры, получить данные get_telemetry, а так же вторичный набор диагностических комманд commander status, sensors status, commander check, mavlink status и тому подобное.
Раздел system предусмотрен для скриптов выполняемых в распбери, по умолчанию там заложены следующие скрипты:
-
undistortion - Запускает ноду для отображения картинки с камеры с учетом коррекции линзы, как ее будет видеть opencv, после запуска надо перейти в раздел images и выбрать отображение undistortion
-
reboot_rasp - Перезапускает полетный компьютер.
-
halt - Корректно останавливает полетный компьютер, что бы не допустить повреждения файловой системы.
-
reboot_clever - Перезапускает клевер.
-
Для экономии ресурсов, данные ноды можно отключить из основного конфига клевера и активировать их, когда это необходимо. web_server - Запускает веб сервер. aruco - Запускает aruco - ноду.
Раздел navigation предусмотрен для произвольных скриптов и полетных программ, которые можно активировать по необходимости.
- get_telemetry.sh - Пример вызова из телеграмм комманды
rosservice call /get_telemetry "{frame_id: ''}"
- navigate_z0.5.sh - Примеры вызовов navigate из телеграмм
rosservice call /navigate "{x: 0.0, y: 0.0, z: 0.5, yaw: 0.0, yaw_rate: 0.0, speed: 0.1, frame_id: 'body', auto_arm: true}"
- navigate_z1.0.sh
rosservice call /navigate "{z: 1.0, frame_id: 'body', auto_arm: true}"
- navigate_z1.5.sh
rosservice call /navigate "{z: 1.5, frame_id: 'body', auto_arm: true}"
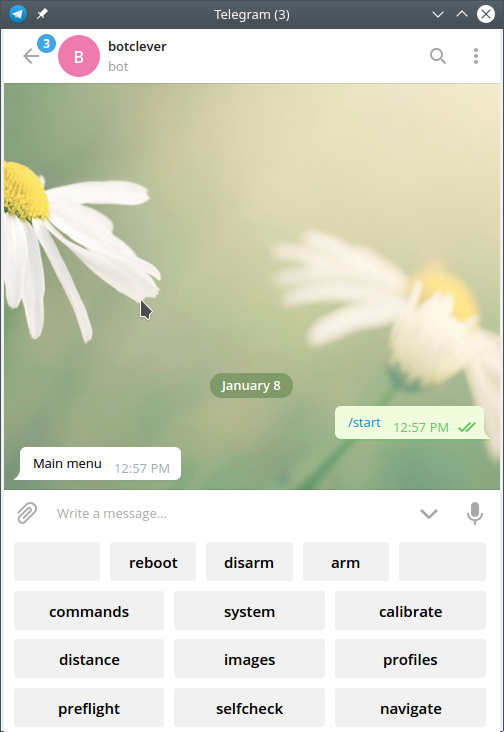
/start Инициирует основное меню
/selfcheck Активирует запуск clever - selfcheck ноды
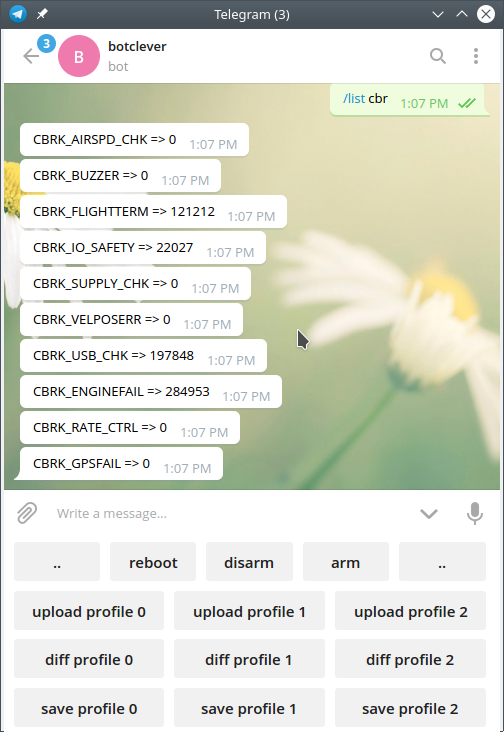
/list xxx Запускает поиск параметров FCU в названии которых встречается ххх, для проверки можно использовать cbr например.
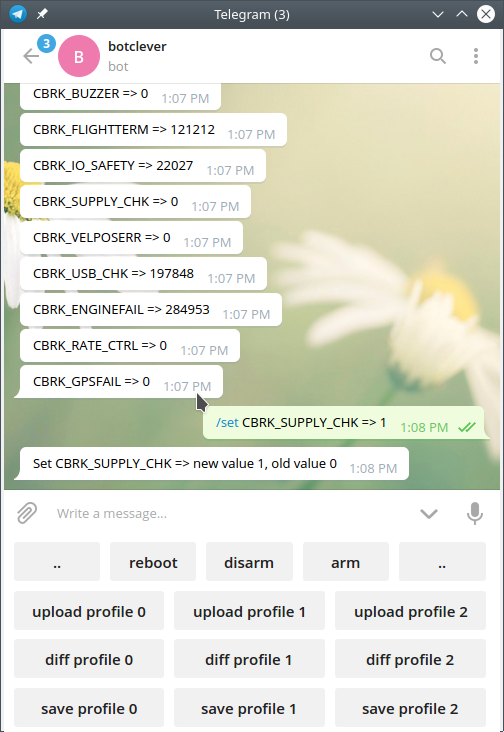
/set px4_param => value Изменяет параметр FCU выставляя значение value. Стоит учитывать что валидность значения тут проверена быть не может, поэтому нужно точно знать что можно и нужно выставлять.
/save Сохраняет все параметры FCU в профайл0
/diff Отображает список измененых параметров в FCU относительно профайл0
/upload Выгружает локальный профайл0 в полетный контроллер.
Для начальной настройки полетного контроллера и клевера их в любом случае надо настраивать предварительно.
Для полной замены пульта, стоит учитывать, какой бы надежной не казалась связь, в любой момент интернет может быть прерван от нескольких секунд до неопределенного времени.
Поэтому, пульт с настроеным kill switch всегда должен быть под рукой.
Для реальных полетов вне закрытых пространств, бот всего лишь средство упрощающее отладку определенных проблем, но не более того.
Ну и разумеется все что вы делаете, делаете на свой страх и риск, если ваши действия вызовут, поломки, аварии, катастрофы, цунами, эпидемии, я предупреждал.
Устанавливать из под пользователя pi. Не из под root.
pip install certifi --user
git clone https://github.com/tech0x/clever_telegram.git /home/pi/catkin_ws/src/clever_telegram/
git clone https://github.com/python-telegram-bot/python-telegram-bot.git /tmp/python-telegram-bot && mv /tmp/python-telegram-bot/telegram /home/pi/catkin_ws/src/clever_telegram/scripts
или установить локальную копию
cd /home/pi/catkin_ws/src/clever_telegram/scripts/ && tar -xzpvf ./telegram.tar.gz
Далее необходимо создать телеграмм бота,
как описано здесь: https://core.telegram.org/bots#6-botfather
После создания телеграмм даст ключ от бота (примерно такого вида 110201543:AAHdqTcvCH1vGWJxfSeofSAs0K5PALDsaw), его нужно вписать в файле вместо поля BOT_TOKEN
/home/pi/catkin_ws/src/clever_telegram/config/token.yaml
После делаем первый запуск и фиксируем наш идентификатор телеграм, что бы никто посторонний не мог отправлять комманды.
roslaunch clever_telegram clever_telegram.launch
Через меню поиск находим своего бота и отправляем ему текстовое сообщение /start
В ответ подгружается основная панель управления.
И на любой последующий клик должно выдаваться сообщение
Incorrect chatid, please update chatid to 442000126 in token.yaml, and restart node
Вписывыаем в файл token.yaml, вместо chatid номер который выдался вместо 442000126.
Перезапускаем ноду и пользуемся.
Для того что бы прописать телеграмм в загрузку надо выполнить комманду из под рута.
systemctl enable /home/pi/catkin_ws/src/clever_telegram/systemd/clever_telegram.service