{kind=link}
{kind=link}
{kind=link}
{kind=link}
Team members: Sabeen Admani, Chukwunyere Igbokwe, Josh Marino, and Andrew Turchina
Objective
Equipment and Hardware Requirements
Preliminary Steps
Project Overview
Implementation
Dependencies
Main Scripts
Further Improvements
Conclusions
The goal of this project is to get a Baxter robot to act as Santa's elf helper. Baxter will have a set of presents and a set of stockings in his workspace. Baxter will identify a stocking, locate the corresponding present, and then place the present in the stocking.
Click on the image below to watch the video!

- Baxter Robot
- ROS Indigo on Ubuntu 14.04
- 1 QR code
- 4 Stockings
- 4 Presents of different colors
- 4 AR tags
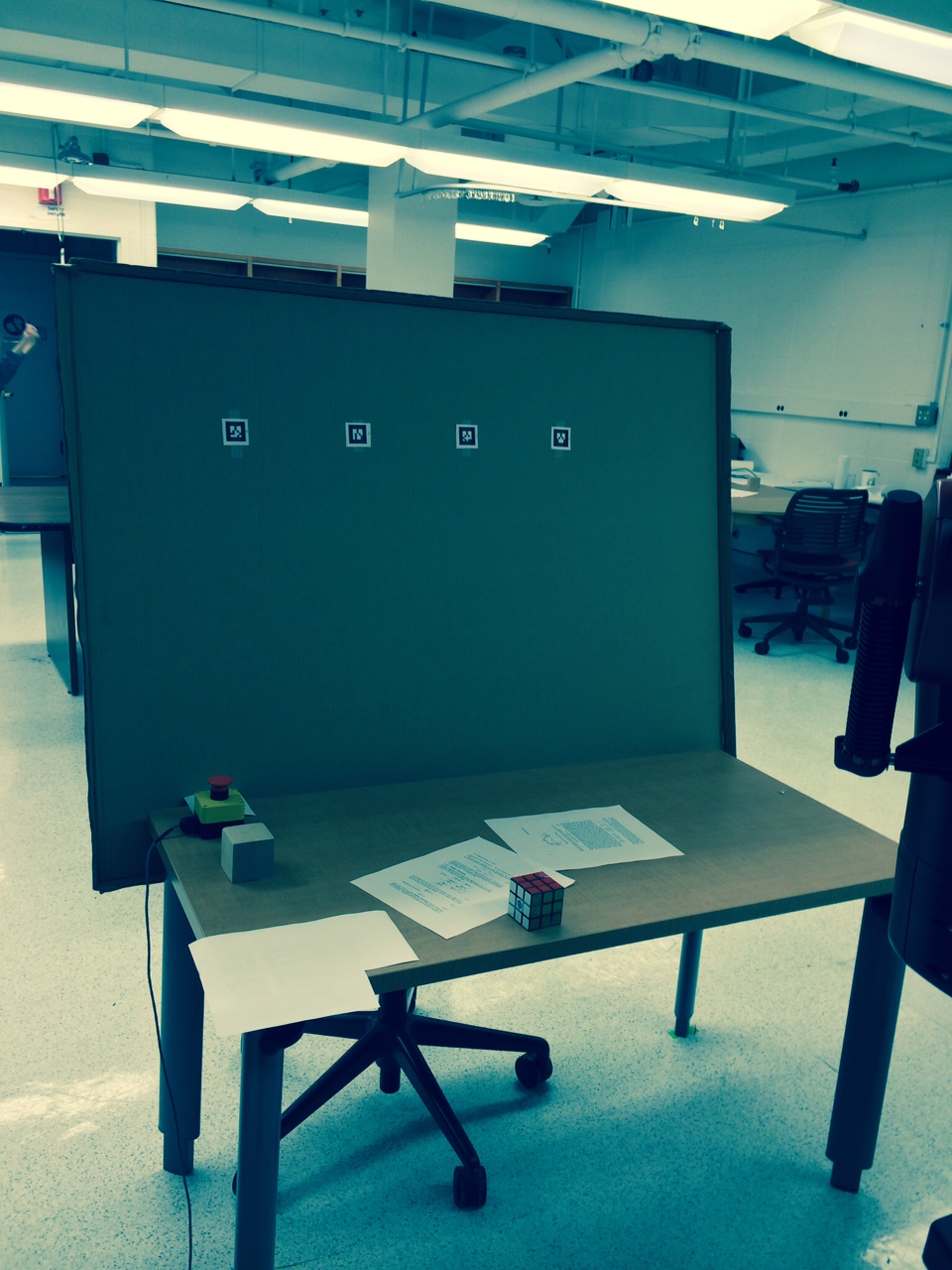
- Table to place presents
- Wall and hangers to place stockings
{kind=link}
Rethink Robotics has Baxter Setup instructions and Workstation Setup instructions.
There needs to be a table with presents within Baxter's reachable workspace, along with a wall of stockings. Both QR codes and ar_tags were used in this project. QR codes can be generated online in many places. To create ar_tags, there are generic samples or one can generate by
rosrun ar_track_alvar createMarker
Outline of the steps that went into building the package that will run Baxter through the program
- Sweep the stockings
- Store the tag ID and location from each stocking
- Relate the stocking tag ID to a present color
- Sweep the table
- Identify the colors and locations of presents
- Move Baxter's gripper to the present location
- Pick up the present
- Move Baxter's gripper to the corresponding stocking location
- Drop the present into the stocking
There are two differnet launch files in our package. The first launch file, ar_trackv2.launch_ is used when you simply want to run the ar_track_alvar package with your camera to see what the tag ID numbers are. This can be used to test the "present identification" when the ID numbers and present colors are modified in the "needed_present_identifier.py" script to match what is specific to your project.
To run the entire sequence, you can simply do a roslaunch:
roslaunch baxter_stocking_stuffer visp_and_move.launch
Below is the launch file used to run the stocking stuffing sequence:
<launch>
<!-- Include launch file that starts AR tracker and identifies stocking -->
<include file="$(find baxter_stocking_stuffer)/launch/ar_trackv2.launch"/>
<!-- Node to open Baxter's left hand camera, after closing them all -->
<node pkg="baxter_tools" type="camera_control.py" name="close_left_camera" output="screen" args="-c left_hand_camera">
</node>
<node pkg="baxter_tools" type="camera_control.py" name="close_right_camera" output="screen" args="-c right_hand_camera">
</node>
<node pkg="baxter_tools" type="camera_control.py" name="close_head_camera" output="screen" args="-c head_camera">
</node>
<node pkg="baxter_tools" type="camera_control.py" name="open_left_camera" output="screen" args="-o left_hand_camera -r 640x400">
</node>
<!-- Launch the tracking node -->
<node pkg="visp_auto_tracker" type="visp_auto_tracker" name="visp_auto_tracker" output="log">
<param name="model_path" type="string" value="$(find visp_auto_tracker)/models" />
<param name="model_name" type="string" value="pattern" />
<param name="debug_display" type="bool" value="True" />
<remap from="/visp_auto_tracker/camera_info" to="/cameras/left_hand_camera/camera_info"/>
<remap from="/visp_auto_tracker/image_raw" to="/cameras/left_hand_camera/image"/>
</node>
<!-- Node that accepts a PoseStamped() message and moves toward it, if a solution is possible. -->
<node pkg="baxter_stocking_stuffer" type="baxtermovement.py" name="movement_node" output="screen" >
</node>
<!-- Once stocking has been identified, determines the pose of the stocking using QR code -->
<node pkg="baxter_stocking_stuffer" type="poseusingidandqrcode.py" name="stocking_pose" output="screen" >
</node> -->
<!-- Node to publish center of object after thresholded with OpenCV -->
<node pkg="baxter_stocking_stuffer" type="open_cv_vision.py" name="vision_node" output="screen" >
</node>
<!-- Node listening to center of object that publishes PoseStamped() message for Baxter's gripper to get within grapsing reach -->
<node pkg="baxter_stocking_stuffer" type="poseusingcolordetection.py" name="color_node" output="screen" >
</node>
<!-- Node that moves Baxter's gripper and held present back to stocking, then releases into stocking -->
<node pkg="baxter_stocking_stuffer" type="back_to_stocking_and_release.py" name="returns_present" output="screen" >
</node>
</launch>
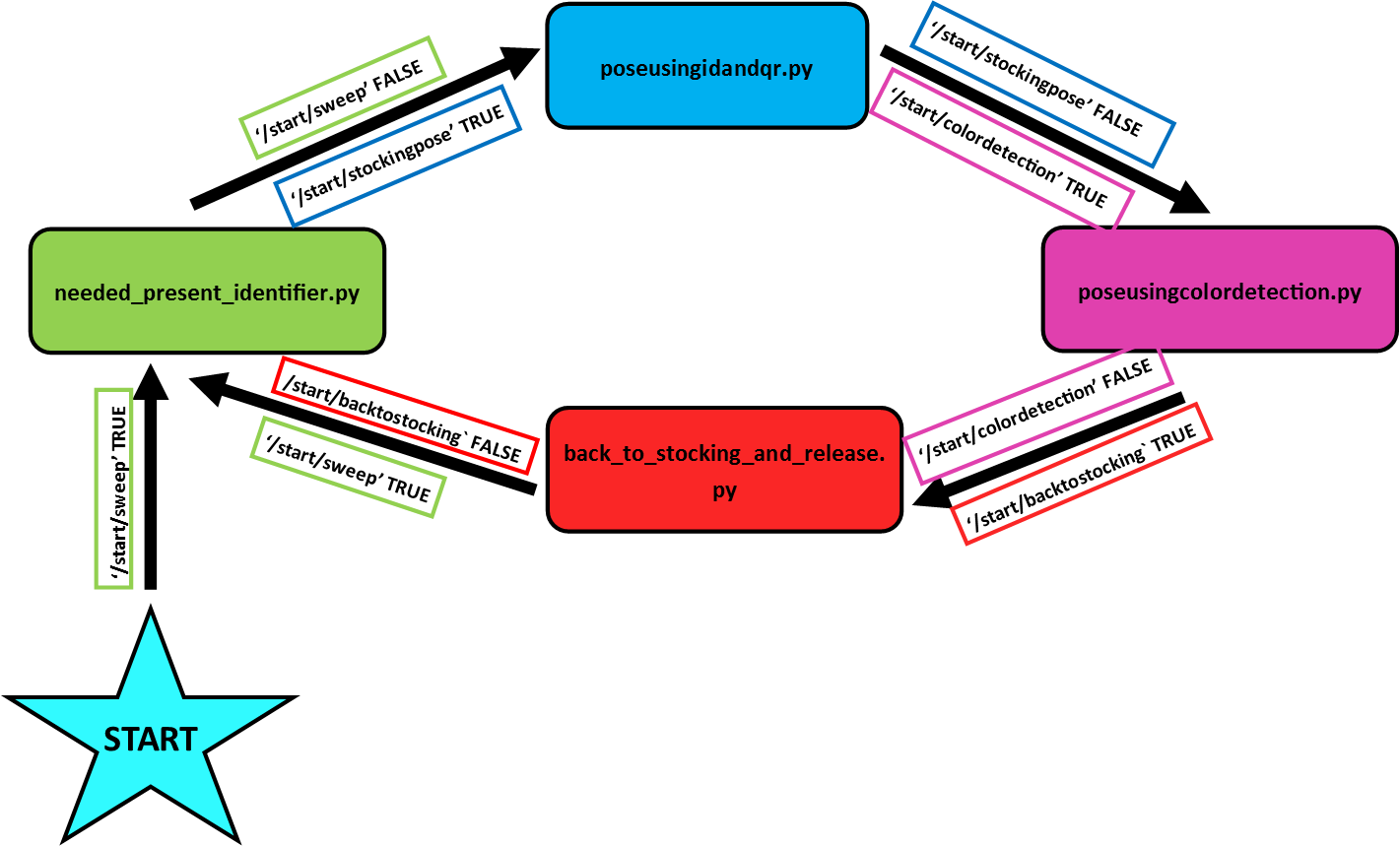
The following nodes run in a specific sequence in order to accomplish stuffing the stockings with presents. The way this is accomplished is by having each of these nodes listen to certain topics that contain Boolean messages of True and False. Published messages of True begin specific actions and False messages are published to stop the action.
Overall function: This node is responsible for moving Baxter's left arm to any desired pose, if it is possible. His inverse kinematics (IK) service is called within this script, and returns a tuple of joint angles when that pose is possible. We set up this node to constantly be subcribing to a topic '/baxter_movement', of type PoseStamped().
- At the beginning of this node, Baxter is enabled and calibrates his left gripper
- The node is constantly subscribing to the topic '/baxter_movement' in order to produce a set of joint angles if the pose is possible within his workspace
- If the pose is not possible, it returns an empty set for joint angles and an error message saying "INVALID POSE - No Valid Joint Solution Found"
Subscribed Topics:
/baxter_movement/posestamped
Overall function: This node moves Baxter to a home configuration to start the stocking stuffing sequence. Once there, Baxter scans all of the stocking ID numbers, and picks the first recorded. In addition, the first recorded ID number is used to tell Baxter which colored present to look for.
- The node starts if the state of '/start/sweep' is True and Baxter moves to a set distance away from the stockings so that he can see all of the tags at once
- When Baxter comes across an ID that is not in his "completed list" of identified presents yet, he publishes the color associated with the ID to /color_identifier and the ID to /scanned_stocking_id
- Publishes False to /state/sweep in order to end the present ID search
- Publishes True to /start/stockingpose in order to begin the next element in the sequence
Published Topics:
/color_identifier/scanned_stocking_id/start/sweep/start/stockingpose/baxter_movement/posestamped
Subscribed Topics:
/ar_pose_marker/start/sweep
Overall function: This node is responsible for moving to each stocking and determining if it matches the goal ID number, found from the previous node. If the current stocking matches the goal stocking ID, Baxter gets the position of the stocking, and publishes its pose as a PoseStamped() message.
- The node starts if state of
/start/stockingposeis True - It sets the state of to
pose/stockingto False - It sets the state of
start/colordetectionto True at the end, starting the next node
Published Topics:
baxter_movement/posestampedstart/stockingposepose/stockingstart/colordetection
Subscribed Topics:
/robot/limb/left/endpoint_state/visp_auto_tracker/object_position/ar_pose_markerscanned_stocking_id/start/stockingpose
Overall function: It is used to identify a specific colored object by thresholding a constant stream of images using HSV values.
- This node listens to which color object Baxter needs to find and selects from the appropriate range of HSV filter values that it needs to use in order to properly identify the object
- Finds the position of the center of the object using moments, and publishes it to the /opencv/center_of_object topic
Published Topics:
/opencv/center_of_object
Subscribers:
/cameras/left_hand_camera/image/color_identifier
Overall function: This node constantly listens to the center of the object from the previous node and incrementally moves closer to the object using a P controller. Once the rangefinder on Baxter's wrist is within a certain thresholding distance, Baxter then grasps the object from a top-down approach. Last, Baxter moves above the table before starting the next node to move back to the stocking.
- The node starts when the state of
/start/colordetectionis True. It publishes False to this topic at the end, when the action is complete - It changes the state of
start/backtostockingto True to start the next node
Publishers:
baxter_movement/posestampedstart/colordetectionstart/backtostocking
Subscribers:
/robot/limb/left/endpoint_state/opencv/center_of_object/start/colordetection
Overall Function: Baxter brings the present back to the stocking pose found in the beginning of the sequence. He then opens the gripper, dropping the present into the stocking.
- The node starts when the state of
/start/backtostockingis True. It publishes to False when the action is complete - Subscribes to the pose of the stocking that was obtained in the second step of the sequence by listening to the topic
/pose/stocking. Baxter then publishes a PoseStamped() message to/baxter_movement/posestampedto move his end effector to that pose - Once his arm reaches that pose, the node changes the state of /start/releasepresent to True
- After releasing the present in the stocking, the state of /start/backtostocking is set to False and /start/sweep is set back to True to begin the sequence again
Published Topics:
/baxter_movement/posestamed/start/backtostocking/start/releasepresent/start/sweep/pose/stocking
Subscribed Topics:
/pose/stocking/start/backtostocking/start/releasepresent
An improvement to this project would be to get Baxter to identify presents and stockings using Microsoft's Kinect or the Asus Xtion Pro Live, as well as PCL's (point cloud libraries), thus eliminating the need for tags. One reason for this is that PCL's are more accurate than tags at identifying poses, but are harder to get working. If we are able to get it working, we could have pictures of each person on the stocking and have Baxter recognize who it is, and then sort presents accordingly. Furthermore, we could locate presents not only using color recognition but also based on their shape. Another improvement would be to use both arms at the same time. For example, one arm could open the stocking while the other hand drops the present in, eliminating the need for having a placeholder in the stocking to hold it open. We could also use both arms at the same time to scan stockings and locate presents ... the possibilities are endless!
It was an awesome project! Hopefully with some improvements we'll settle for running Santa's workshop since Baxter will never be able to fit down chimneys. Ho-Ho-Ho!