{kind=link}
EXPERIMENTAL AND UNTESTED CODE RESEARCH CODE! THAR BE DRAGONS AHEAD LADDY!
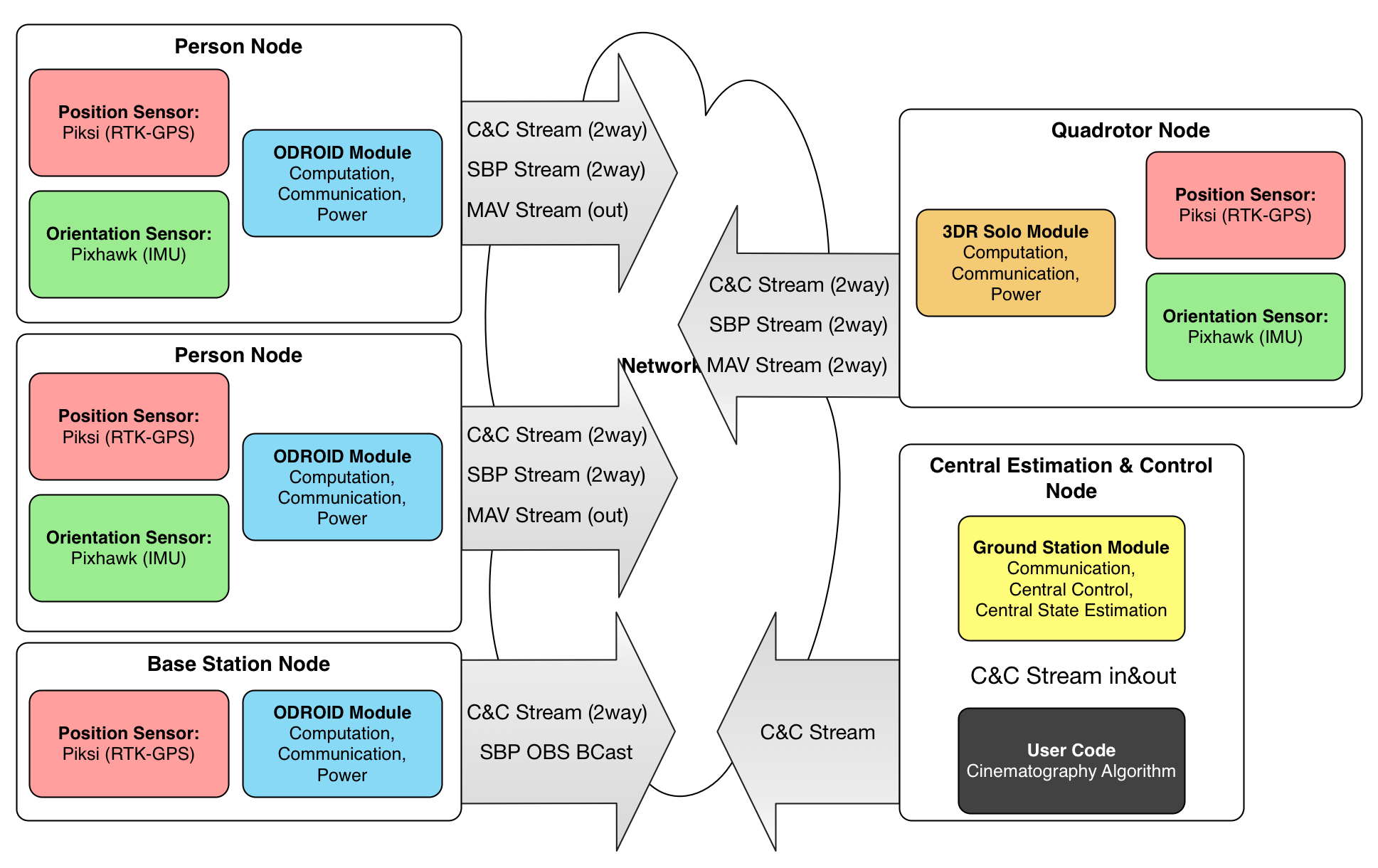
A Library and Toolkit for Wireless Distributed State Estimation and Control of Multiple Drones and Subjects. Named after the Quantum Entanglement phenomenon.
This code runs a wireless multi-node sensor networks, powering our wireless cinematography system. It currently assumes a python-compatible Linux computers at each node. (In our case, ODROID XU4 running Ubuntu and Python 2.7)
The tools does not make the master. A master chooses great tools for his craft. I am far from full mastery, but at this stage of my journey, here's the tools I choose for my craft:
- Macbook Pro, OS X 10.10 Yosemite
- Git and Github
- SourceTree for visualizing Git repositories.
- Markdown for documentation
- Sublime Text 3
- BASH
- Dropbox stores all my files.
- Divvy, with reasonable keyboard shortcuts to push windows around.
- Quicksilver app launcher
- Caffeine for power control
- f.lux for nighttime coding
groundstation(-local).sh: Launch an instance of the grounstation.groundstation(-local).sh: Launch an instance of the odroidperson.install.sh: For nodes: Installs "spooky" systemctl daemon to start odroidperson.sh on boot.update-and-restart.sh: For nodes: Pulls the latest git repo and relaunches daemon.
groundstation: Main controller, single instance on your Laptopodroidperson: Multiple Instances, One Per Odroid On Personreplay: Script to replay recorded data, as if live sensors are playingpiksibase: Helper executable, if you want to run only a ONLY a piksi SBP Broadcasterspooky: Underlying shared library used by both parts
What a great place to start! See all the available logfiles here!
./bin/replay logs/state0000356.pickle
Now, use your favorite port monitoring tool, or just run mine! In a different window:
python experiments/simple_udp_listener.py --port 19001
Check out ./bin/replay --help for more commands!
Fire up a local debug odroidperson instance:
./bin/odroidperson-local.sh
Fire up a local groundstation instance:
./bin/groundstation-local.sh
Fire up a UDP listener to check your output:
python experiments/simple_udp_listener.py --port 19000
Start playing with the CLI from groundstation:
>>> help
>>> status
Firing up remote Piksi consoles
For Solo's Piksi:
python piksi_tools/console/console.py -p 192.168.2.1:18002
For Person 1 and 2 Piksi:
python piksi_tools/console/console.py -p 192.168.2.1:19214
python piksi_tools/console/console.py -p 192.168.2.1:19224
Alt Compensation
We include a manual altitude compensation / calibration routine:
solo up <mm>
solo set_alt_comp <mm>
This project uses git submodules
After checkout:
git submodule init
git submodule update
These are the dependencies. You can install them directly, or just install 'em from the submodules and you'll have the same version I'm using!
git submodule init
git submodule update
cd lib/libsbp/python
sudo python setup.py install
cd ../../mavlink/pymavlink
sudo python setup.py install
cd ../../dronekit-python
sudo python setup.py install
-
python dev stuff
sudo apt-get install python-setuptools python-pip python-dev -
libsbp https://github.com/swift-nav/libsbp
git clone https://github.com/swift-nav/libsbp cd libsbp sudo python setup.py install -
pymavlink https://github.com/mavlink/mavlink
sudo apt-get install python-dev git clone https://github.com/mavlink/mavlink cd mavlink/pymavlink sudo python setup.py install -
dronekit https://github.com/dronekit/dronekit-python
sudo pip install dronekit
The Ground Station relays messages from Piksi Console to each individual Piksi in the field.
Point Piksi Console to listen for SBP messages on:
<GroundStation IP>:<sbp-relay-send-port>
Piksi Console can send SBP messages to:
<GroundStation IP>:<sbp-relay-recv-port>
The documentation and protocol spec lives here.
Solo creates a wireless network. The controller, Solo, and any connected devices are on the same network subnet. The network layout is:
10.1.1.1 - Controller
10.1.1.10 - Solo
10.1.1.100+ - Connected Devices
Connect to your solo's wifi: SSID = SoloLink_XXX and password = sololink.
Ping your device:
ping -c 3 10.1.1.1
ping -c 3 10.1.1.10
Install solo cli and check out docs:
pip install -UI git+https://github.com/3drobotics/solo-cli
Update and provision Solo:
solo flash both latest --clean
solo wifi --name="wifi ssid" --password="wifi password"
solo resize
<restart by hand>
solo resize
solo info
solo provision
Get started with dronekit from the ground station:
sudo pip install dronekit
Attempt to connect from your laptop in python:
from dronekit import connect
vehicle = connect('0.0.0.0:14550', wait_ready=True)
print "Vehicle state:"
print " Global Location: %s" % vehicle.location.global_frame
print " Global Location (relative altitude): %s" % vehicle.location.global_relative_frame
print " Local Location: %s" % vehicle.location.local_frame
print " Attitude: %s" % vehicle.attitude
print " Velocity: %s" % vehicle.velocity
print " Battery: %s" % vehicle.battery
print " Last Heartbeat: %s" % vehicle.last_heartbeat
print " Heading: %s" % vehicle.heading
print " Groundspeed: %s" % vehicle.groundspeed
print " Airspeed: %s" % vehicle.airspeed
print " Mode: %s" % vehicle.mode.name
print " Is Armable?: %s" % vehicle.is_armable
print " Armed: %s" % vehicle.armed
or
from pymavlink import mavutil
c = mavutil.mavlink_connection("10.1.1.10:14550")
Check out all the sweet examples!
This section of the Piksi integration enables Solo to fly using RTK and Piksi in Pseudo-Absolute mode.
This assumes you're using the 3DR Accessory Port
We're going to set up SERIAL2 (uartD) as GPS1, and SERIAL3 (uart?) as GPS2. SERIAL2 is on the Accessory Port, so we will plumb this to Piksi. SERIAL3 is wired to the internal ublox GPS, so we will leave that as is. uartE aka SERIAL4 is wired to the Gimbal.
Here's the mapping of serial ports on Pixhawk(2):
| HAL | System | Params | Pixhawk | Solo |
|---|---|---|---|---|
| px4io/sbus? | /dev/ttyS0 | |||
| uartA | /dev/ttyACM0 | USB | ||
| uartB | /dev/ttyS3 | SERIAL3 | GPS | Internal GPS |
| uartC | /dev/ttyS1 | SERIAL1 | Telem1 | |
| uartD | /dev/ttyS2 | SERIAL2 | Telem2 | Acc. Port |
| uartE | /dev/ttyS6 | SERIAL4 | Serial4 | Gimbal |
| nsh console | /dev/ttyS5 | Serial5 | Acc. Port |
Setup Piksi:
Choose which UART will connect to Solo. I used UARTA for it's position. Configure the following Piksi settings. Make sure you're producing solutions at 5Hz, not the default 10Hz!
| Section | Setting | Value |
|---|---|---|
| UART A | mode | SBP |
| UART A | sbp message mask | 65280 |
| UART A | conigure telemetry radio | False |
| UART A | baudrate | 115200 |
| Solution | soln freq | 5 |
Also set up a surveyed base station. The PIXHAWK driver requires pseudo-absolute positioning (POS_LLH messages with a flag indicating RTK lock). This can only be generated if the base station also transmits a BASE_POS message containing a surveyed location.
| Section | Setting | Value |
|---|---|---|
| surveyed lat | measure it | |
| surveyed lon | measure it | |
| surveyed alt | measure it |
On the base station, ensure that the OBS messages are small enough to fit into MAVLink:
| Section | Setting | Value |
|---|---|---|
| SBP | obs msg max size | 102 |
Connect Piksi to the Accessory Port as follows:
| Piksi | Accessory Port |
|---|---|
| GND | GND |
| RX | SER2_TX |
| TX | SER2_RX |
| VCC | ? |
Setup Pixhawk
Connect to the solo using mavproxy:
mavproxy.py --master udp:0.0.0.0:14550
Now, set up the necessary parameters:
param set GPS_TYPE 1
param set GPS_TYPE2 1
param set SERIAL2_BAUD 115
param set SERIAL2_PROTOCOL 5
param set SERIAL3_BAUD 38
param set SERIAL3_PROTOCOL 5
param set EKF_POSNE_NOISE 0.1
To enable GPS Altitude, set the following params. (Thanks to Paul Riseborough for this!) This enables the secondary EKF, and runs multiple instances for redundancy.
param set EK2_ENABLE 1
param set EKF_ENABLE 0
param set AHRS_EKF_TYPE 2
param set EK2_IMU_MASK 3
Turn on the Piksi's simulation mode, and in mavproxy, run:
status
You should see:
GPS_RAW_INT {time_usec : 642108000, fix_type : 5, lat : 374292190, lon : -1221738005, alt : 69740, eph : 160, epv : 65535, vel : 396, cog : 12748, satellites_visible : 9}
GPS2_RAW {time_usec : 0, fix_type : 1, lat : 373625480, lon : -1221125932, alt : -208190, eph : 9999, epv : 65535, vel : 0, cog : 0, satellites_visible : 0, dgps_numch : 0, dgps_age : 0}
This section demonstrates how to create a bi-directional relay of SBP data from Piksi, via sololink to your ground staton.
Setup iMX6
Follow these directions to setup libsbp on Python. Mirrored here:
pip install -UI git+https://github.com/3drobotics/solo-cli
solo wifi --name=<ssid> --password=<password>
solo install-smart
solo install-runit
solo install-pip
solo resize
Download Logs
Do this periodically
cd spooky/logs
solo logs download
Connect the Piksi USB to the Solo USB
See this discussion.
Use an OTG USB cable, such as this or this one. Connect the host side (blue) to the iMX6 (that is, solo).
Put the iMX6 USB into host mode. By default it exposes a serial port. Use or make a jumper and connect GND to 3DRID.
SSH into solo, and check that Piksi is available on Solo:
ssh 10.1.1.10
cd /dev/serial/by-id
ls -lah
and you should see something like
drwxr-xr-x 2 root root 60 Jan 2 09:05 ./
drwxr-xr-x 4 root root 80 Jan 1 1970 ../
lrwxrwxrwx 1 root root 13 Jan 1 1970 usb-FTDI_Single_RS232-HS-if00-port0 -> ../../ttyUSB0
Notice the FTDI driver - that's Piksi!
Install libsbp
Time to get busy! Install libsbp on Solo and check out the libsbp docs:
ssh 10.1.1.10
pip install sbp
mkdir /home/root/Code
Install solo sbp relay
Copy the src/solo/main.py file to your solo:
rsync -avz src/solo/main.py root@10.1.1.10:/home/root/Code
Create a service to auto-start main.py. Copy-paste this into the shell:
mkdir -p /etc/solo-services/spooky/
cat <<'EOF' | tee /etc/solo-services/spooky/run
#!/bin/bash
cd /home/root/Code && exec python main.py
EOF
chmod +x /etc/solo-services/spooky/run
First, set up Virtualbox and Vagrant
Then, to fire up the simulator:
vagrant up
vagrant ssh
./sitl.sh
param load ../Tools/autotest/copter_params.parm
param set ARMING_CHECK 0
This will start transmitting data on 0.0.0.0:14550
The Odroid XU-4 is (as of end-2015) the most popular companion computer for sUAS research [source: Niels' Urban Dictionary]. It comes equipped with a suite of features that makes it amazingly well-suited for high performace computing on a flying platform: an eight-core processor (Arm A15 and A9 processors), USB3.0, and GPIO pins.
Flash Odroids with Ubuntu 15.04 image onto MicroSD card using these instructions
I'm assuming you've got your ODROID plugged into an HDMI screen, mouse and keyboard. You just booted and you're staring at an Ubuntu desktop.
- Connect your odroid to a wired internet connection
- Double-click "ODROID Utility" on the desktop, and enter the SU password 'odroid' (things install...)
- Resize the root partition
- Set a better hostname
- reboot!
Now it's time to install things for us! See the section on dependencies and submodules!
sudo apt-get install python-setuptools python-pip python-dev
mkdir ~/Code
cd Code
git clone https://github.com/njoubert/spooky.git
cd spooky
From here on, look to the rest of this document :)
GUI Way:
Open System -> Preferences -> Network Connections Edit Wired Connection 1 IPv4 Settings:
Address: 192.168.2.xx Netmask: 255.255.255.0 Gateway: 192.168.2.1
username: odroid
password: odroid
Add the following to your local computer's .ssh/config file:
host odroid51 192.168.2.51
Hostname 192.168.2.51
Port 22
User odroid
StrictHostKeyChecking no
UserKnownHostsFile=/dev/null
IdentityFile ~/.ssh/id_rsa
host odroid52 192.168.2.52
Hostname 192.168.2.52
Port 22
User odroid
StrictHostKeyChecking no
UserKnownHostsFile=/dev/null
IdentityFile ~/.ssh/id_rsa
host odroid53 192.168.2.53
Hostname 192.168.2.53
Port 22
User odroid
StrictHostKeyChecking no
UserKnownHostsFile=/dev/null
IdentityFile ~/.ssh/id_rsa
Then, copy your public key to each odroid. If this fails, make sure the .ssh directory exists!
scp id_rsa.pub odroid@192.168.2.51:.ssh/authorized_keys
scp id_rsa.pub odroid@192.168.2.52:.ssh/authorized_keys
scp id_rsa.pub odroid@192.168.2.53:.ssh/authorized_keys
Now you can easily SSH in with:
ssh odroid51
ssh odroid52
ssh odroid53
Use the supplied odroid-utility
sudo odroid-utility.sh
We do a UNIX-style "many-independent-small-applications" approach, but wrapped behind a single python CLI (similar to MAVProxy)
- PRO: If something crashes, we can just restart that section
- PRO: Good way to think about problems!
- PRO: Can still restart individual chunks, etc
- CON: Have to do all that management myself.
Components are engineered to depend on as few other parts of the system as possible. Different components can be rebooted on-the-fly without crashing anything.
https://pylibftdi.readthedocs.org/en/latest/troubleshooting.html
sudo kextunload -bundle-id com.apple.driver.AppleUSBFTDI
I am not using, but am curious about:
- Twisted, "an event-driven networking engine written in Python"
- NodeJS, why why why didn't I do this in NodeJS??? Sigh, all the UAV libraries are in python...