sudo apt-get install ros-hydro-moveit-full
Moveit configuration for the crustcrawler ax12 depends on the au_crustcrawler_base package
This package provides a default configuration of moveit for the crustcrawler robot
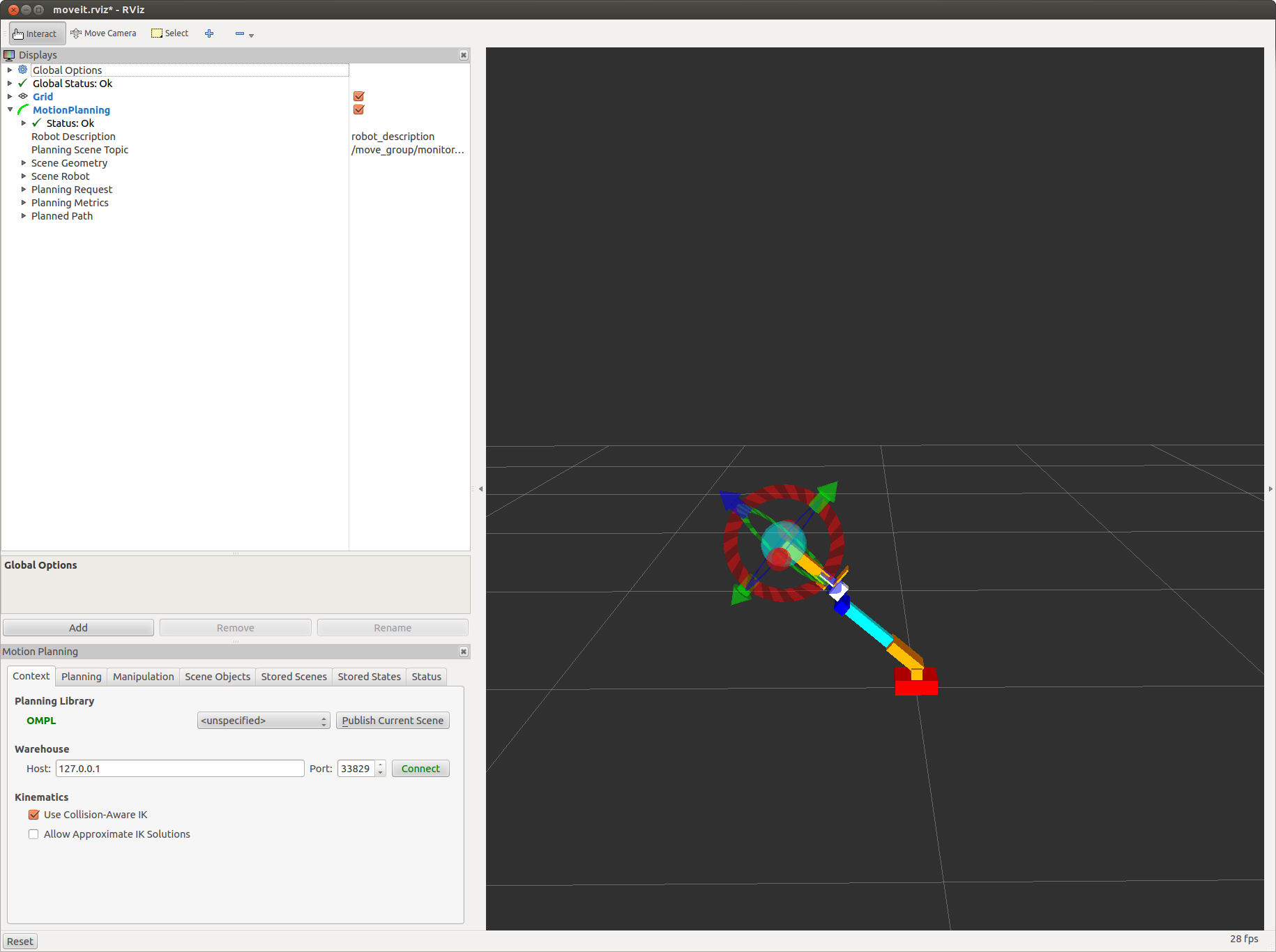
roslaunch au_crustcrawler_moveit demo.launch
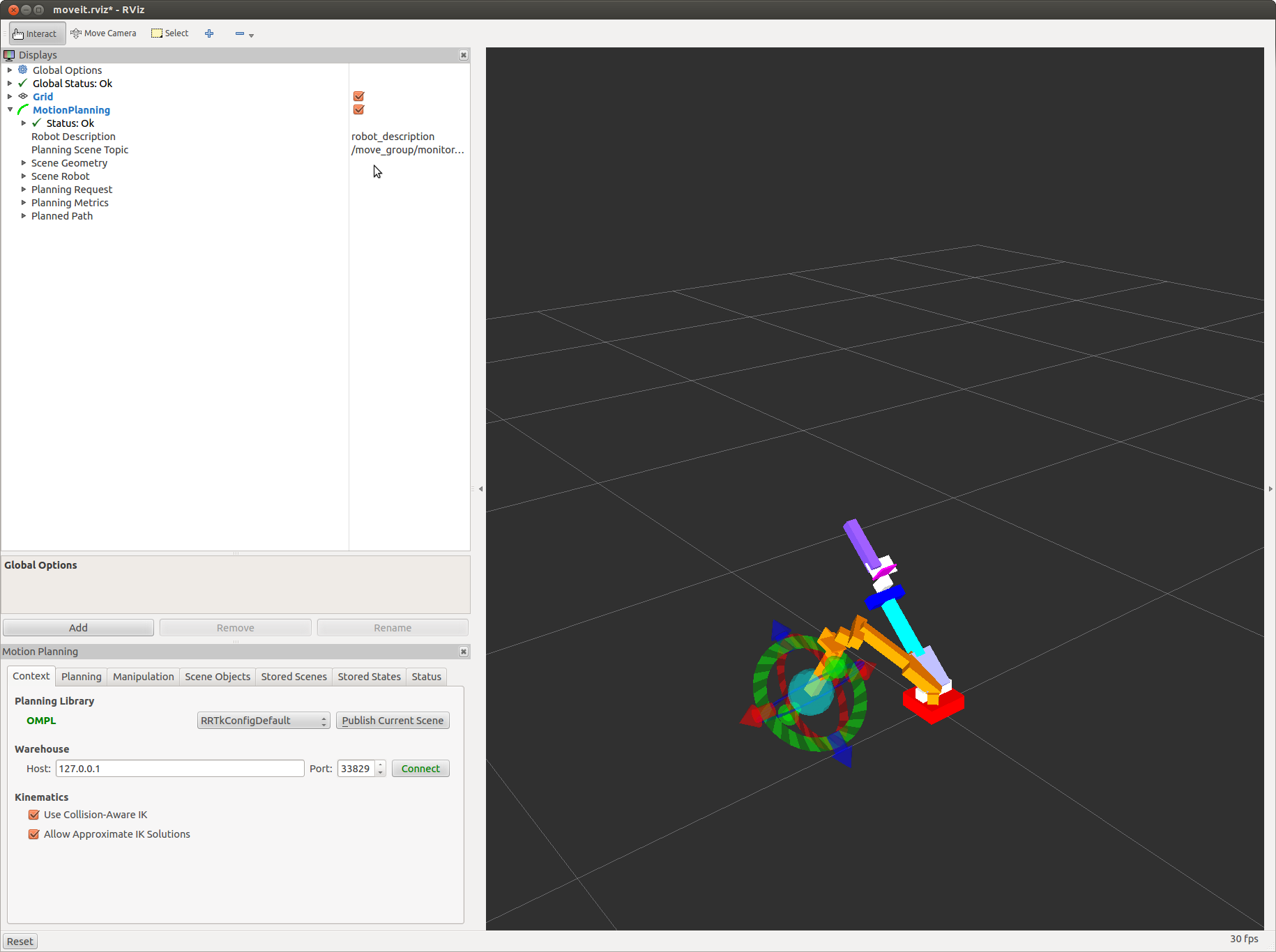
note: remember to tick the "Allow Approximate IK solutions" checkbox (lower left of image).
roslaunch au_crustcrawler_base base.launch
Wait for the motor to be initialised
In another terminal window
roslaunch au_crustcrawler_base meta.launch
and then
roslaunch au_crustcrawler_moveit real_robot.launch
Use the interactive marker to move the tip of the robot to a new position and to go the Planning Tab in the lower left area and click "plan & execute", the robot should now move to the commanded position.
The robot can also be commanded using the moveit group python API.
see example
Note that the trajectories generated by moveit via the python API are automatically visualised in RVIZ.