Pure python project to generate and learn collision free movement in real environments using a Riemannian geometric approach.
Install
pip install -r requirements.txt
Run all tests
pytest tests
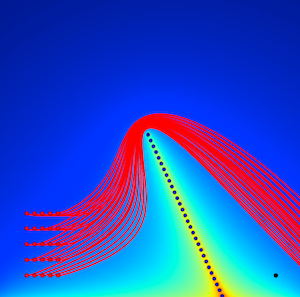
Result of
python examples/plot_barrier.py
For a technical presentation of the algorithm developed in this work refer to the following publication
@inproceedings{mainprice2016warping,
title={Warping the workspace geometry with electric potentials for motion optimization of manipulation tasks},
author={Mainprice, Jim and Ratliff, Nathan and Schaal, Stefan},
booktitle={Intelligent Robots and Systems (IROS), IEEE/RSJ International Conference on},
pages={3156--3163},
year={2016}
}