
RHex a bio-inspired, hexapedal robot designed for locomotion in rough terrain. It can drive over rocks, mud, sand, snow, and railroad tracks. ARHex adds an arm to this configuration, hence the name..
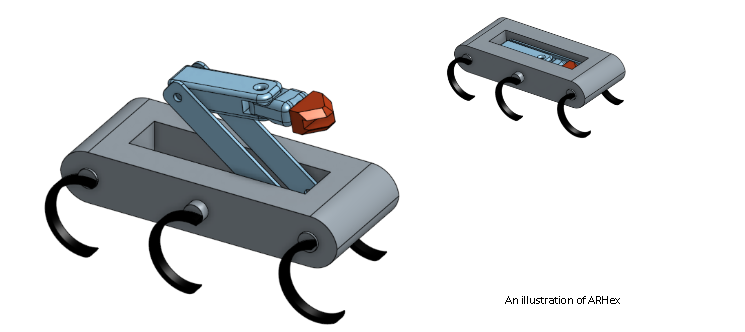
illustration of ARHex
This gives robot, the capability to interact and manipulate objects around it. The endeffector can be modified for pick & place, spraying gun, welding torch, camera, etc. Also the arm can be retracted easily into the base; this would be particularly useful when robot topples as it traverses through rough terrain, where the legged robots are usually deployed.
Visit the channel for more videos.
To run the package you need the following installed and configured.
- ROS Melodic Morenia
- Gazebo - 9
Navigate to ~/catkin_ws/src your catkin_workspace.
Clone the repository
git clone https://github.com/navalab/ARHex.git
And build the catkin_workspace
catkin_make --source src/ARHex
Overlay the current catkin_workspace on top of your environment.
source devel/setup.bash
Load the robot model in Gazebo
roslaunch arhex_gazebo arhex.launch
In another terminal, start the controllers
roslaunch arhex_control arhex_control.launch
to make it walk, in another terminal
rosrun arhex_control arhex_control.py
- Model Base and legs
- Implement simple walking gait
- Attach arm and endeffector
- Write hardware_driver
- Vaishnava Hari - website - github
advised by Dr. T. Mohanraj
*I am looking for potential collaborators to make advancements.
This project is licensed under the GPLv3 License - see the LICENSE file for details