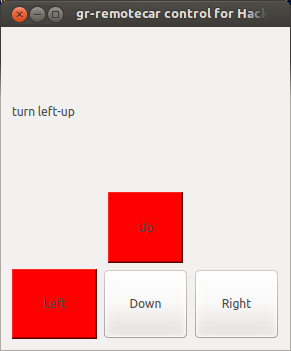
I wrote a GNURadio module to generate control signal for toy remote controlled car, and a Qt(PySide) GUI to listen keyboard press.
detail and source code: http://github.com/scateu/gr-remotecar
blog: http://hackrf.net

mkdir build
cd build
cmake ..
make
sudo make install
sudo ldconfig
refer to examples/
examples/WheelPulse/Wheel.py is a simple PySide based controller which you can control your toy car with keyboard direction keys. And it is for RemoteCarIIBaseBand
on examples/tx.sh and examples/rx.sh , I demo how to capture the car's remote signal and just replay it. And it turns out to make the car run.
cd examples
./rx.sh car.iq
./tx.sh car.iq
and it means:
hackrf_transfer -t car.iq -f 27000000 -s 8000000 -a 1 -l 30 -i 30 -x 40
27000000 is for 27MHz, you may find the frequency sign on you car's remote.
We support two kind of remote car control :
-->|TIME3 |<-- TIME4
--------+ +-------+ +-------+ +--------- ... -------+ +---.....
| | | | | | | |
| | | | | | | |
| | | | | | | |
| | | | | | | |
+----+ +----+ +----+ +----+
TIME0 TIME0 TIME0
-->| TIME2 |<---
TIME0 = 520us
TIME3 = 300us to 1.3ms
TIME4 = 300us to 1.3ms
TIME2 = 20ms
TIME3 and TIME4 control car's accelerator and direction.
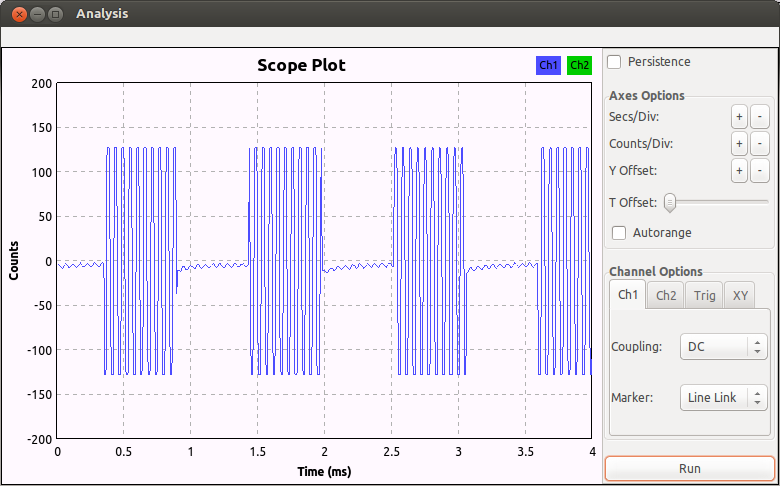
+----------+ +----------+ +----------+ +----------+ +-----+ +-----+
| | | | | | | | | | | |
| | | | | | | | | | | |
| | | | | | | | | | | |
| | | | | | | | | | | |
| | | | | | | | | | | |
| | | | | | | | | | | |
+ +-----+ +-----+ +-----+ +-----+ +-----+ +-...
|<- 3t ->| t |<- 3t ->| t |<- 3t ->| t |<- 3t ->| t | t | t | t |
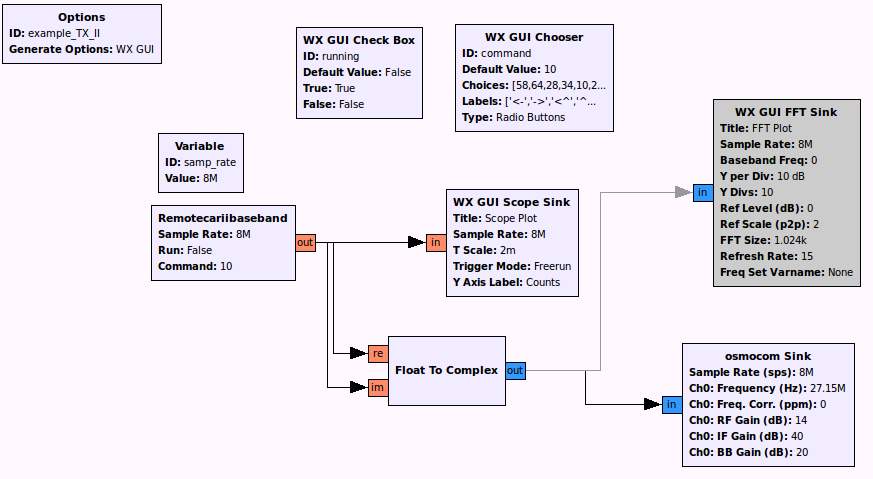
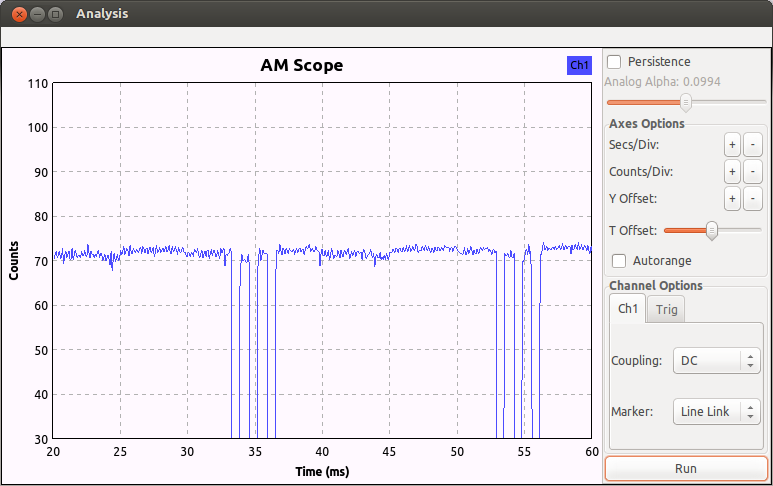
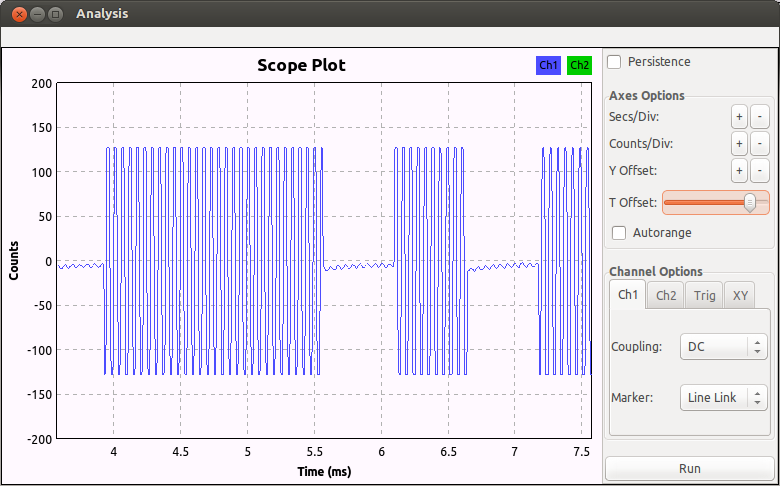
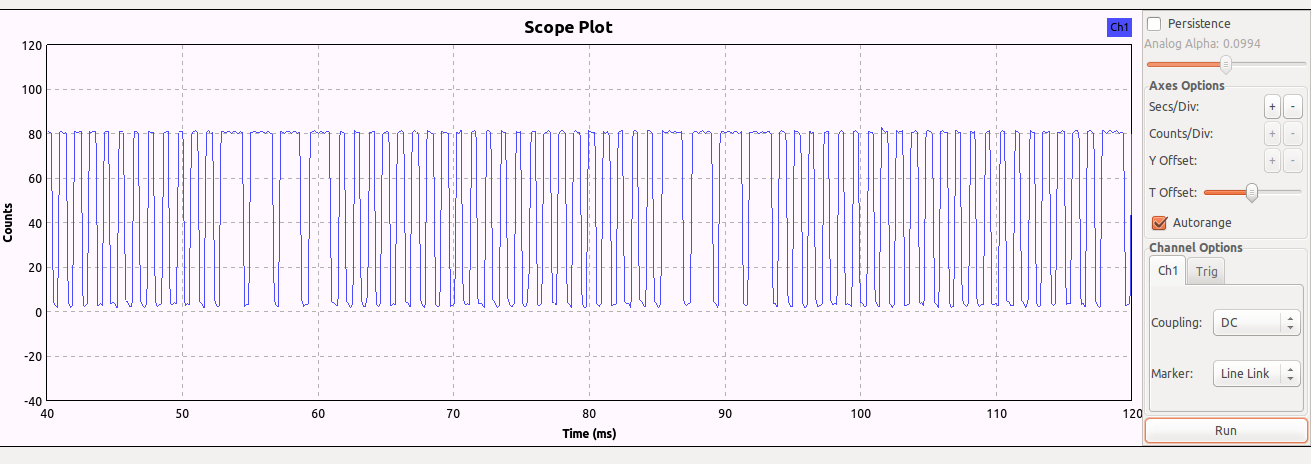
and we can simply capture it with HackRF using a AM demode gnuradio-companion workflow.
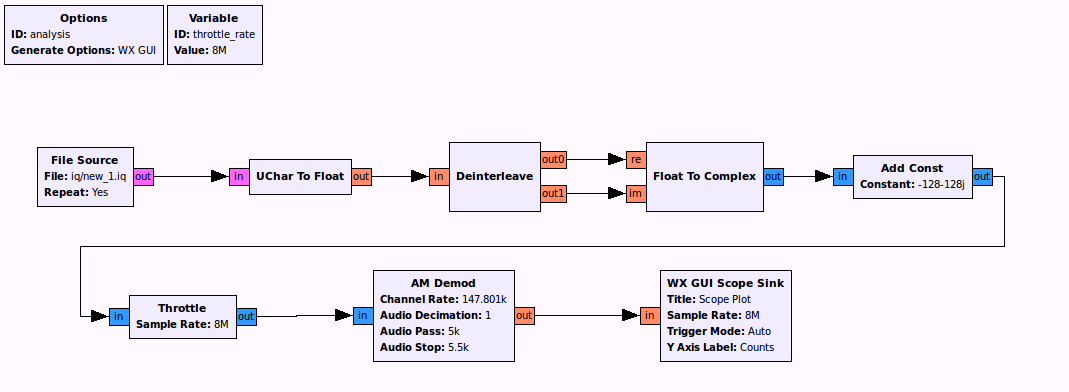
examples/analysis.grc
Left: n=58
Right: n=64
Forward: n=10
Fast Forward: n=22
Backward: n=40
Left Forward: n=28
Right Forward: n=34
Left Backward: n=46
Right Backward: n=52
t = 0.55 ms
and you can try it with examples/WheelPulse/Wheel.py