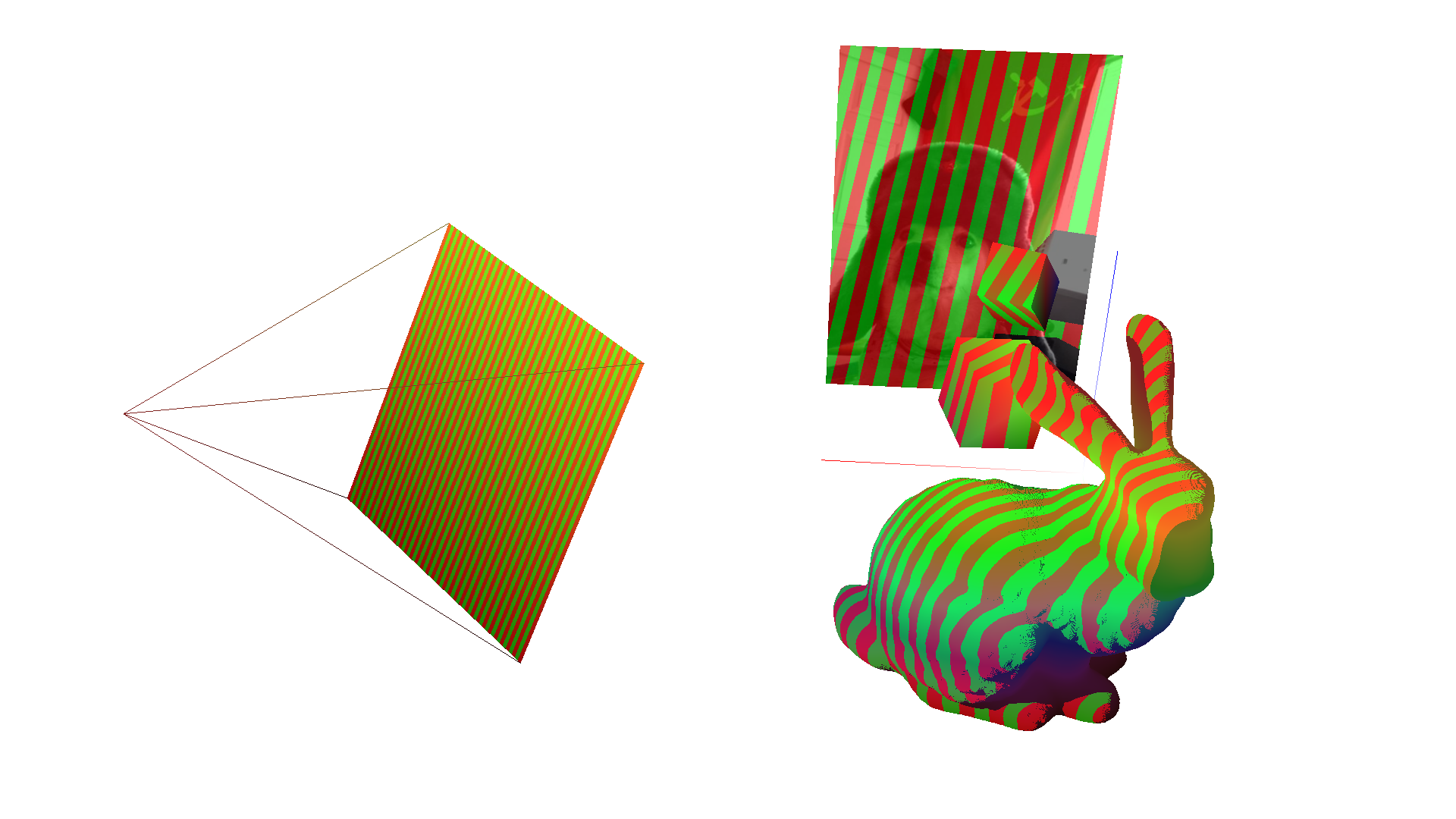
3D scanner based on structured light.
If scene objects are highlighted with binary encoded stripes from projector - we can retriangulate rays from camera with planes corresponding to projector stripes. The retriangulated 3D points are the points from objects in scene.