{kind=link}
{kind=link}
In this project, the goal is to teach two agents to move two tennis rackets so that they bounce a ball over a net between them for as long as possible. Each of the two agents has access to the environment's 8 dimensional state, which consists of the position and velocity of both the ball and racket. Each of these 8 dimensional states takes on continuous values for each racket agent. From this state, the agent learns which of four actions it should take. Each agent receives a reward of +0.1 if the agent his the ball over the net. If the agent lets the ball his the ground or bounces it out of bounds, it receives a rewar of -0.01. Each agent has two continuous actions available, one for moving towards or away from the net, and one for jumping. The agents have solved the environment when they average a score of +0.5 over 100 consecutive episodes (where the maximum is taken over the two agents).
To replicate this results of this project you need to create a conda environment using python 3.6 and activate it. This can be done as follows for Linux or Mac. (For windows, follow Udacity's instructions)
$ conda create --name drlnd python=3.6 $ source activate drlnd (drlnd) $
Then in your environment, install OpenAI's gym as follows:
(drlnd) $ git clone https://github.com/openai/gym.git (drlnd) $ cd gym (drlnd) $ pip install -e .
After installing gym, you must install Udacity's required python packages as follows:
(drlnd) $ git clone https://github.com/udacity/deep-reinforcement-learning.git (drlnd) $ cd deep-reinforcement-learning/python (drlnd) $ pip install .
Then you create a Jupiter notebook kernel that can run the Unity environment provided by Udacity as follows:
(drlnd) $ python -m ipykernel install --user --name droned --display-name "drlnd"
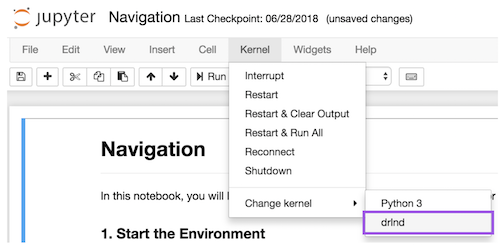
When running in the Jupiter notebook you can start your your notebook kernel as shown below.
Next you will download the rebuild Unity Environment at one of these links:
Linux: One Agent Linux: No Visualization - One Agent
Mac: One Agent
You can then explore the environment by going to the Udacity DRLND GitHub (here) repository and open the Tennis.ipynb file in the p3_collab-compet (here).
To train, in your terminal run the following:
(drlnd) $ python3 ./training.py
graph TD
./training.py --> ./ddpg_agent.py
./ddpg_agent.py --> ./model.py
This will run a Deep Deterministic Policy Gradients with the following default hyper parameters:
(drlnd) $ python3 ./training.py \ --n_episodes 400 \ --max_t 1000 \ --BUFFER_SIZE 1e5 \ --BATCH_SIZE 64 \ --GAMMA 0.99 \ --TAU 1e-3 \ --LR_ACTOR 1e-4 \ --LR_CRITIC 1e-4 \ --CRITIC_WEIGHT_DECAY 0 \ --fc1_units 400 \ --fc2_units 300 \ --seed 42 \ --model_num 1 \
To train multiple agents (and have it run in the background, in your terminal run the following:
(drlnd) $ nohup python3 MultiModel.py &
You can edit the loops inside MultiModel.py to control what hyper-parameters you train with.