Kentaro Wada,
Edgar Sucar,
Stephen James,
Daniel Lenton,
Andrew J. Davison
Dyson Robotics Laboratory , Imperial College London
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020
Dyson Robotics Laboratory , Imperial College London
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020
MoreFusion is an object-level reconstruction system that builds a map with known-shaped objects, exploiting volumetric reconstruction of detected objects in a real-time, incremental scene reconstruction senario. The key components are:
- Occupancy-based volumetric reconstruction of detected objects for model alignment in the later stage;
- Volumetric pose prediction that exploits volumetric reconstruction and CNN feature extraction from the image observation;
- Joint pose refinement of objects based on geometric consistency among objects and impenetrable space.



There're several options for installation:
- Python project only: Python framework for pose estimation (e.g., training, inference, refinement).
- ROS project for camera demonstration: ROS framework for object-level mapping with live cameras.
- ROS project for robotic demonstration: ROS framework for robotic demonstration with object-level mapping.
make installmkdir -p ~/ros_morefusion/src
cd ~/ros_morefusion/src
git clone https://github.com/wkentaro/morefusion.git
cd morefusion
make install
cd ~/ros_morefusion
ln -s src/ros/*.sh .
./rosdep_install.sh
./catkin_build.robot_agent.sh
source .autoenv.zshrobot-agent: A computer for visual processing.robot-node: A computer with real-time OS for Panda robot.
Same as above instruction: ROS project for camera demonstration.
mkdir -p ~/ros_morefusion/src
cd ~/ros_morefusion/src
git clone https://github.com/wkentaro/morefusion.git
cd ~/ros_morefusion
ln -s src/ros/*.sh .
./catkin_build.robot_node.sh
source devel/setup.bash
rosrun franka_control_custom create_udev_rules.shPre-trained models are provided in the demos as following, so this process is optional to run the demos.
cd examples/ycb_video/instance_segm
./download_dataset.py
mpirun -n 4 python train_multi.py # 4-gpu training
./image_demo.py --model logs/XXX/XXX.npz# baseline model (point-cloud-based)
cd examples/ycb_video/singleview_pcd
./download_dataset.py
./train.py --gpu 0 --centerize-pcd --pretrained-resnet18 # 1-gpu
mpirun -n 4 ./train.py --multi-node --centerize-pcd --pretrained-resnet18 # 4-gpu
# volumetric prediction model (3D-CNN-based)
cd examples/ycb_video/singleview_3d
./download_dataset.py
./train.py --gpu 0 --centerize-pcd --pretrained-resnet18 --with-occupancy # 1-gpu
mpirun -n 4 ./train.py --multi-node --pretrained-resnet18 --with-occupancy # 4-gpu
mpirun -n 4 ./train.py --multi-node --pretrained-resnet18 # w/o occupancy
# inference
./download_pretrained_model.py # for downloading pretrained model
./demo.py logs/XXX/XXX.npz
./evaluate.py logs/XXXcd examples/ycb_video/pose_refinement
./check_icp_vs_icc.py # press [s] to start# using orb-slam2 for camera tracking
roslaunch morefusion_panda_ycb_video rs_rgbd.launch
roslaunch morefusion_panda_ycb_video rviz_static.desk.launch
roslaunch morefusion_panda_ycb_video setup_static.desk.launch
Figure 1. Static Scene Reconstruction with the Human Hand-mounted Camera.
# using robotic kinematics for camera tracking
roslaunch morefusion_panda_ycb_video rs_rgbd.robot.launch
roslaunch morefusion_panda_ycb_video rviz_static.robot.launch
roslaunch morefusion_panda_ycb_video setup_static.robot.launch
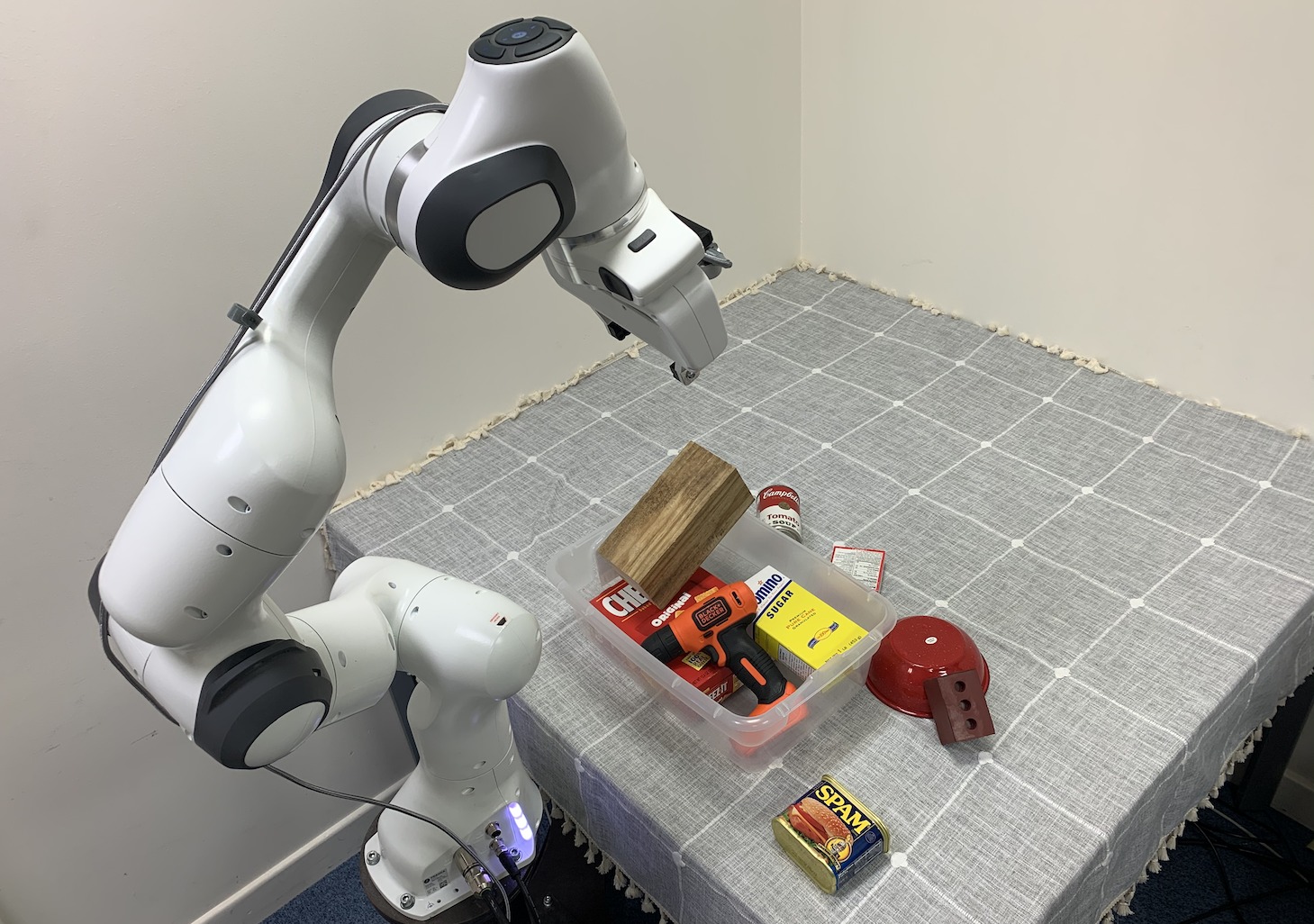
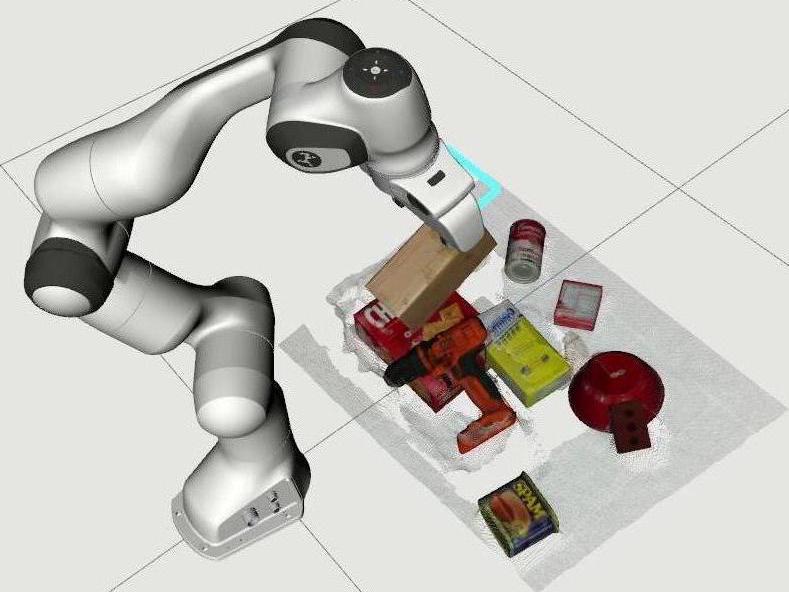
Figure 2. Static Scene Reconstruction with the Robotic Hand-mounted Camera.
roslaunch morefusion_panda_ycb_video rs_rgbd.launch
roslaunch morefusion_panda_ycb_video rviz_dynamic.desk.launch
roslaunch morefusion_panda_ycb_video setup_dynamic.desk.launch
roslaunch morefusion_panda_ycb_video rs_rgbd.robot.launch
roslaunch morefusion_panda_ycb_video rviz_dynamic.robot.launch
roslaunch morefusion_panda_ycb_video setup_dynamic.robot.launch
Figure 3. Dynamic Scene Reconstruction with the Human Hand-mounted Camera.
robot-agent $ sudo ntpdate 0.uk.pool.ntp.org # for time synchronization
robot-node $ sudo ntpdate 0.uk.pool.ntp.org # for time synchronization
robot-node $ roscore
robot-agent $ roslaunch morefusion_panda panda.launch
robot-node $ roslaunch morefusion_panda_ycb_video rs_rgbd.robot.launch
robot-node $ roslaunch morefusion_panda_ycb_video rviz_static.launch
robot-node $ roslaunch morefusion_panda_ycb_video setup_static.robot.launch TARGET:=2
robot-node $ rosrun morefusion_panda_ycb_video robot_demo_node.py
>>> ri.run()


Figure 4. Targetted Object Pick-and-Place. (a) Scanning the Scene; (b) Removing Distractor Objects; (c) Picking Target Object.
If you find MoreFusion useful, please consider citing the paper as:
@inproceedings{Wada:etal:CVPR2020,
title={{MoreFusion}: Multi-object Reasoning for {6D} Pose Estimation from Volumetric Fusion},
author={Kentaro Wada and Edgar Sucar and Stephen James and Daniel Lenton and Andrew J. Davison},
booktitle={Proceedings of the {IEEE} Conference on Computer Vision and Pattern Recognition ({CVPR})},
year={2020},
}