NOTE: This project is currently abandoned
There is more active development over at https://github.com/NiklasFauth/hoverboard-firmware-hack. We already have a working custom firmware for the hoverboard mainboard, complete with ADC, PPM and Nunchuck control. (See the linked video in the description there)

Project has been done in Amiqual4Home Equipex Creativity Lab - https://amiqual4home.inria.fr/
With hoverbot, you can do some vehicle, chassis :
- supporting up to 264lbs (120kg).
- moving silently thanks to two 350W brushless motors in wheels
- locally or remotely controlled,
- at an unbeatable price buying some spare parts :
- Mother board - 55 eur
- 36V battery - 100 eur
- two wheels - 160 eur
- additional components - 40 eur
- Total = 355 eur
- or more cheaper :
- just buy an hoverboard and get these parts from it - 260eur
- additional components - 40eur
- Total = 300eur
Hoverboard are chinese low cost products. Low cost spare parts gives meaningful two wheels drive platform.
You don't have to be an electronic master to do it. To have motors working, you just have to connect hoverbot shield. You can either make this shield by yourself or you can get it from (TODO).
With hoverbot you will be able to drive your :
- robot
- chair
- old dog
- couch
- [Two hoverboard motors] (http://gyro-service.com/moteur/19-moteur.html)
- [Hoverboard mother board] (http://gyro-service.com/cirquit-carte-mere-smart-self-balancing-wheel/17-carte-mere.html)
- [36V battery] (http://gyro-service.com/batteries-samsung-smart-balance-wheel-gyropode/18-battterie-22p-samsumg-ou-de-qualite-equivalente.html)
- hoverbot shield
- Arduino Teensy 3.1/3.2
Refer ifixit for a detailed analysis of hoverboard components. Interesting parts are :
- how do these components interact?
- is it possible to control hoverboard externally?
Daughterboard can be used either on right/left. So we only bought 1 daughterboard to decode Daughterboard / motherboard exchanged data.
We connected the 2 motherboard / daughterboard connectors to a single motherboard.
In this case when rotating motherboard, wheels are rotating in two different direction.
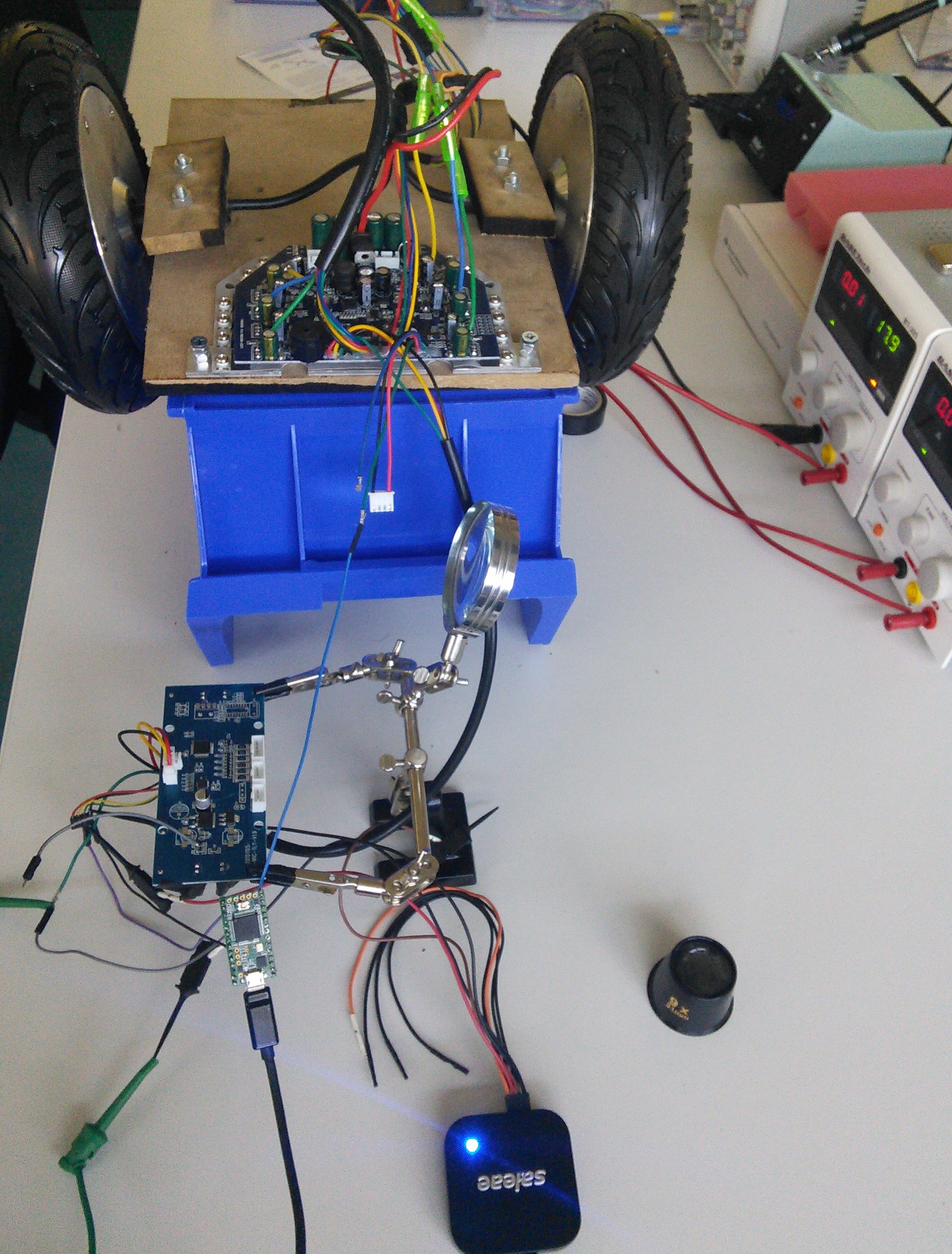
Probing a logic analyser on daughterboard 4 wire connectors gives some interesting info :
- logic level = 3.3V
- bit duration ~ 38.10µs => baud rate ~ 26300kbps

Is it a standard protocol?
- may be UART? Some clues can help... Green and yellow lines of daughterboard are connected to STM32F103 PA2 - UART2 TX and PA3 - UART3 RX In order to get UART parameters :
- get maximum frame length taking for example a frame of 0 or a frame of 0/1/0/ and so on... After that you will conclude (helped with Salae logic ananlysers): Daughterboard send data to motherboard using 3.3V UART @26300bps - 1 stop bit - no parity bit.
Here are decoded data with UART analyzer in Salae Logic software :

Do not move daughterboard, power motherboard and read decoded data. We can see :
- redondant 256 integer : it is frame start => frame size = 6 9bits integers
Now let's play with photodiode used in daughterboard contacts :
- if we hide at least one of it last frame integer = 85
- otherwise last frame integer = 170 If 170 value is sent to motherboard : motors won't be driven (it means user to not have its feet on hoverboard) (it means user to not have its feet on hoverboard)
4 remaining bytes must be decoded : two of these bytes repeats. Rotating daughterboard gives indication :
- little move only modify a frame integer => this integer must be low significant 9bit
- more rotation modifies other integer => rotation seems to be encoded on 2 9 bit integers. Rotating around 0 helps us : Angular value is coded in 2x9bits signed integer value (2's complement)
We can check it is only an angular value applying linear acceleration to daughterboard. In this case angular value do not change.
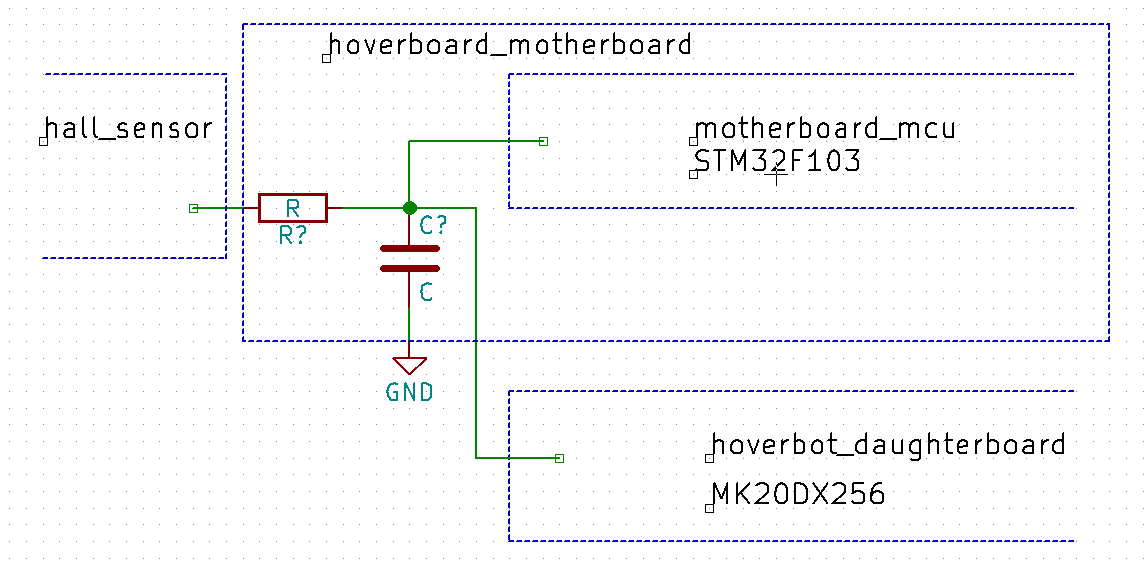
In wheels some hall sensors are used to get wheel speed (3 sensors per wheel). On mother board, sensor pulses are filtered using an RC filter. To get speed, we must connect it to hoverbot.
If we trigger a digital output (channel 0) on a rising edge (channel 0) we do not have a clean signal :

With a zoom :
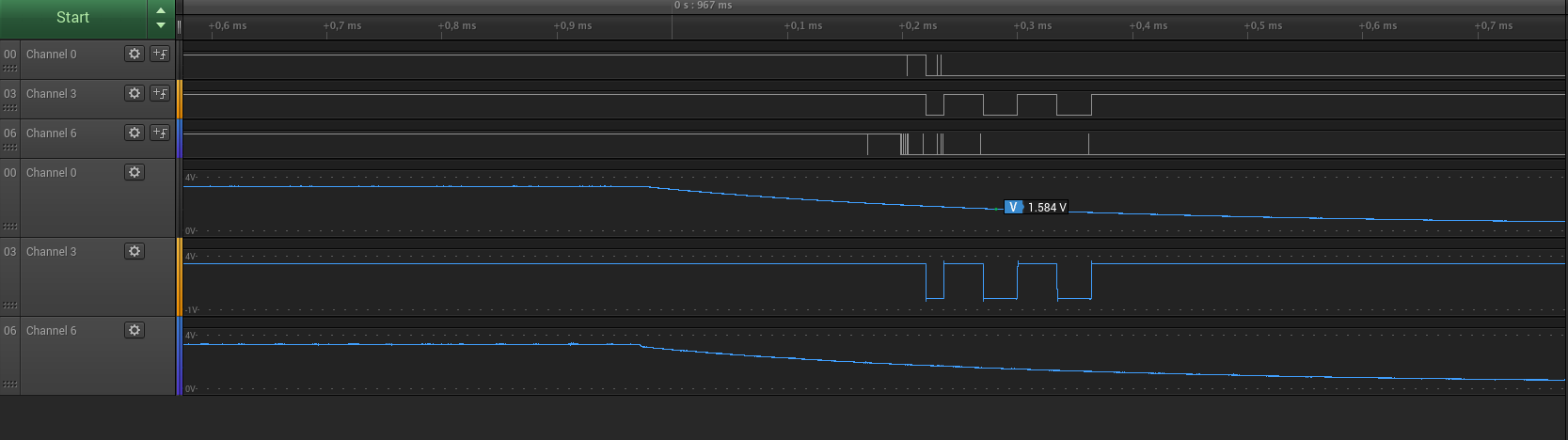
Small oscillation when V=Vdd/2 generates some falling /rising edges. Because of RC time constant, we can get lot of oscillations leading to some false detections. It could be software filtered (either using timer or checking multiple times read value). As I prefer capturing Hall sensor pulses using external interrupt it is better to have an hardware solution. As Teensy MCU does not have any input schmitt trigger we will add it :

After we have a good pulse detection :

In order to control hoverboard we need an external MCU to :
- send left and right foot angular position => we need two UART Tx lines supporting 9bits UART @ 26300bps
- optionally read daughterboard current postion (for tests) => we need 1 UART Rx line supporting 9bits UART @ 26300bps
Different MCU can be used, we could use UART bitbanging libraries... But a nice solution is to use teensy 3.1/3.2 :
- it runs @3.3V
- [9 bit uart supported on Arduino Core] (https://www.pjrc.com/teensy/td_uart.html)
- 3 avaialble hardware UARTs!
Edit :
your_arduino_core_folder/hardware/teensy/avr/cores/teensy3/HardwareSerial.h
Uncomment :
#define SERIAL_9BIT_SUPPORT
Several libraries are provided in this repo :
- hoverboard : hoverboard control / feddbacks
- brushless_hall_sensor
- logger
If you use arduino IDE, you must create symlinks/shortcuts from these libraries path to Arduino library folder :
ln -s your_folder/hoverbot/hoverbot_embedded_software/teensy_hoverboard/hoverboard arduino_user_path/libraries/
ln -s your_folder/hoverbot/hoverbot_embedded_software/teensy_hoverboard/brushless_hall_sensor arduino_user_path/libraries/
ln -s your_folder/hoverbot/hoverbot_embedded_software/teensy_hoverboard/logger arduino_user_path/libraries/
Then from Arduino IDE add these libraries.
Edit your_folder/hoverbot/hoverbot_embedded_software/teensy_hoverboard/logger/logger_config.h
and set needed log level (refer your_folder/hoverbot/hoverbot_embedded_software/teensy_hoverboard/logger/README.md)
As we saw in our first tests, when same daughterboard is connected to two motherboards/daughterboard connectors :
- wheels rotating direction is different. Hoverboard is rotating In this case same angular value on left foot and right foot is sent to motherboard. In order to have hoverboard moving forward / backward we must apply for example :
- a positive angular value on right foot daughterboard Uart
- negative angular value on left foot daughterboard Uart
From that simple code is provided here :
Refer code
In echoGoForward() function : it reads current angular value from daughterboard to control hoverboard in forward direction.
After testing we can easily :
- control speed of both wheels when it is rotating in different direction (under load or not)
But we cannot :
- control speed of both wheels when it is rotating is same directions (not under load). In this case, motors reach needed value but quickly speed up until max speed
We can suppose, closed loop algorithm on motherboard does not support forward / backward mooving when it is not under load.
Hoverboard control over UART can be done running :
python3 your_folder/hoverbot/hoverbot_gateway_software/examples/hoverboard_uart_control/hoverboard_uart_control.py -p TEENSY_PORT

power_on
power_off
set_speed motor1_value motor2_value
x // Manual keyboard control => hoverbot controlled using numeric pad
TODO
TODO ###ROS
TODO

- http://www.electronicspoint.com/threads/reverse-engineering-a-hoverboard-with-wheels-accelerometer.279098/
- http://drewspewsmuse.blogspot.fr/2016/06/how-i-hacked-self-balancing-scooter.html
- https://developer.mbed.org/users/Thomas_H/code/HoverboardTest/
- improve hoverboard control
- continue cleaning (remove some unused attributes in hoverboard)
- add PID : measure reliable speed from hall sensors
- use all days a reliable racing chair
- make hoverbot shield : deliver CAD
- ROS compatible?
- get error status