Source code for https://hal.archives-ouvertes.fr/hal-01481052
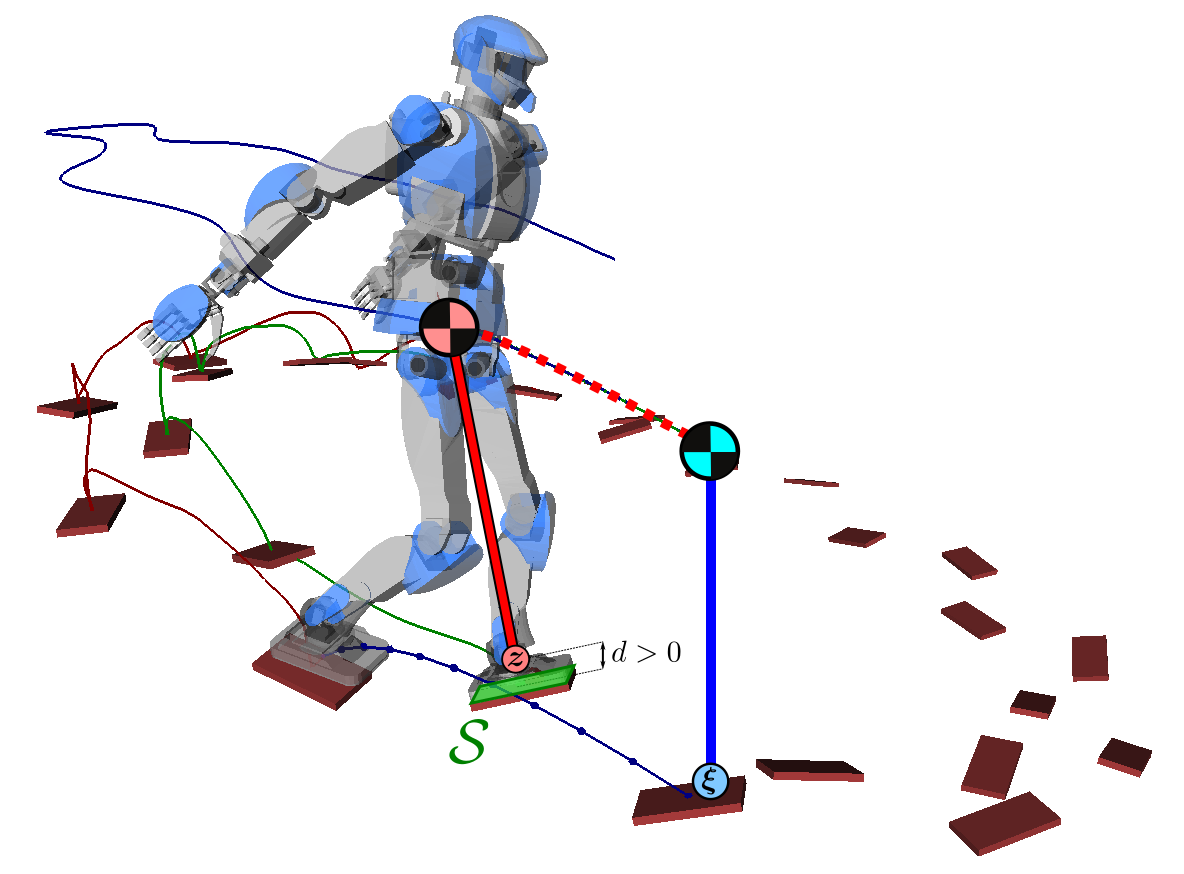
We present a real-time rough-terrain dynamic walking pattern generator. Our method automatically finds step durations, which is a critical issue over rough terrains where they depend on terrain topology. To achieve this level of generality, we introduce the Floating-base Inverted Pendulum (FIP) model where the center of mass can translate freely and the zero-tilting moment point is allowed to leave the contact surface. We show that this model is equivalent to the linear-inverted pendulum mode with variable center of mass height, aside from the fact that its equations of motion remain linear. Our design then follows three steps: (i) we characterize the FIP contact-stability condition; (ii) we compute feedforward controls by solving a nonlinear optimization over receding-horizon FIP trajectories. Despite running at 30 Hz in a model-predictive fashion, simulations show that the latter is too slow to stabilize dynamic motions. To remedy this, we (iii) linearize FIP feedback control computations into a quadratic program, resulting in a constrained linear-quadratic regulator that runs at 300 Hz. We finally demonstrate our solution in simulations with a model of the HRP-4 humanoid robot, including noise and delays over both state estimation and foot force control.
Authors: Stéphane Caron and Abderrahmane Kheddar
The following instructions were verified on various machines running Ubuntu 14.04 and 16.04.
-
Install OpenRAVE: here are instructions for Ubuntu 14.04 as well as for Ubuntu 16.04
-
Install Python and related dependencies:
sudo apt-get install cython python python-dev python-pip python-scipy python-shapely -
Install Python packages:
sudo pip install pycddlib quadprog pyclipper -
Install CasADi. Pre-compiled binaries are available, but I recommend you build it from source. When installing IPOPT, make sure to install the MA27 linear solver (
ThirdParty/HSLfolder). -
Install TOPP:
git clone https://github.com/quangounet/TOPP.git
cd TOPP && mkdir build && cd build
cmake ..
sudo make installFinally, clone this repository and its submodule via:
git clone --recursive https://github.com/stephane-caron/fip-walking.gitIf you already have pymanoid installed on your system, make sure that its version matches that of the submodule.
Run the main script via:
./walk.py -efor the elliptic staircase scenario./walk.py -rfor a regular staircase
Feel free to post your questions or comments in the issue tracker.