{kind=link}
{kind=link}
{kind=link}
rtl_rafcon_sm ==== state machines for robocup@home (and other competitions) challenges/tasks/tests over the years
Dev (show) branch ==== Here are all state machine which are not released and still under development!
A little introduction to Rafcon (taken from the original rafcon github)
- Documentation: Hosted on Read the Docs
- Homepage: DLR-RM.github.io/RAFCON/
- License: EPL
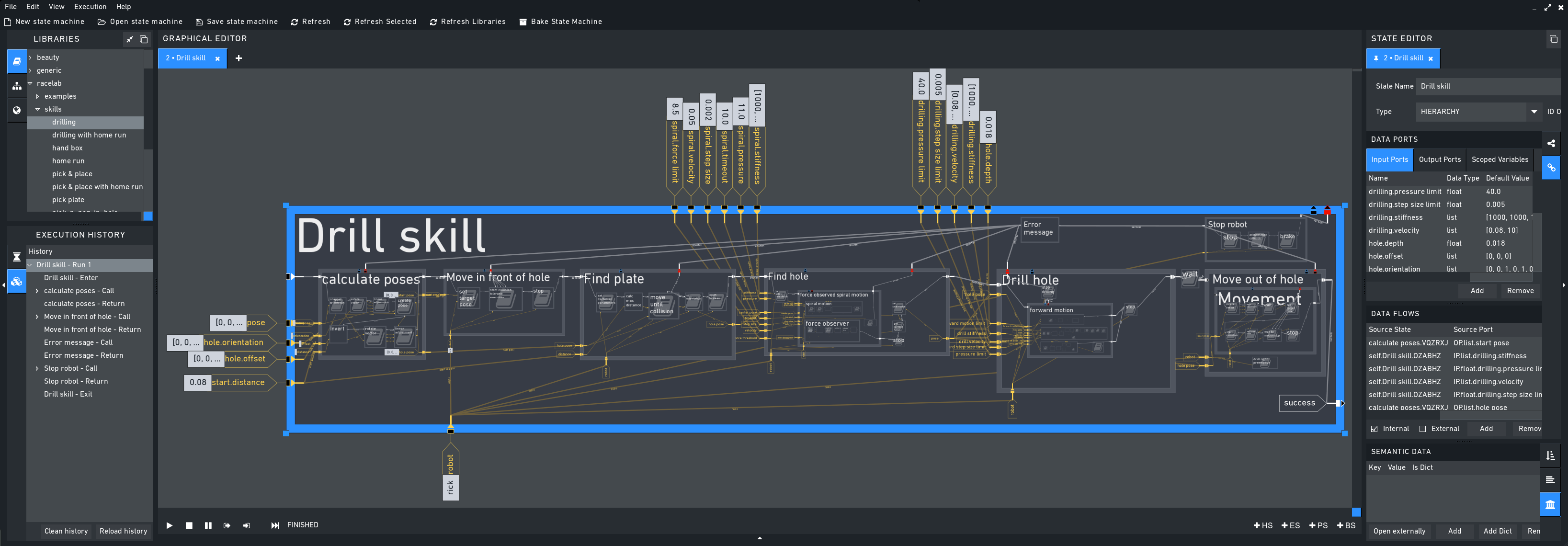
RAFCON uses hierarchical state machines, featuring concurrent state execution, to represent robot programs. It ships with a graphical user interface supporting the creation of state machines and contains IDE like debugging mechanisms. Alternatively, state machines can programmatically be generated using RAFCON's API.
Universal application
RAFCON is written in Python, can be extended with plugins and is hard- and middleware independent.
Visual programming
The sophisticated graphical editor can be used for the creation, execution and debugging of state machines.
Collaborative working
Share and reuse your state machines in form of libraries, stored as JSON strings in text files.
Rafcon/State Machine Preview Picutures ===== To give an Idea how the state machine looks like the following picutures represents different state machines, which we developed using rafcon.
Receptionist ===== An example of our current solution of Receptionist

Take out the Garbage ===== An example of our current solution of Take out the garbage

Drop off thrash (from Take out the garbage) ===== An example of our current solution of drop off thrash, which gets used as a library in take out the garbage)
