def smoothMLS1D(actor, f=0.2, showNLines=0):
'''
Smooth actor or points with a Moving Least Squares variant.
The list actor.variances contain the residue calculated for each point.
Input actor's polydata is modified.
f, smoothing factor - typical range s [0,2]
showNLines, build an actor showing the fitting line for N random points
'''
coords = vu.coordinates(actor)
ncoords = len(coords)
Ncp = int(ncoords * f / 10)
nshow = int(ncoords)
if showNLines: ndiv = int(nshow / showNLines)
if Ncp < 3:
vc.printc('Please choose a higher fraction than ' + str(f), 1)
Ncp = 3
poly = vu.polydata(actor, True)
vpts = poly.GetPoints()
locator = vtk.vtkPointLocator()
locator.SetDataSet(poly)
locator.BuildLocator()
vtklist = vtk.vtkIdList()
variances, newline, acts = [], [], []
for i, p in enumerate(coords):
locator.FindClosestNPoints(Ncp, p, vtklist)
points = []
for j in range(vtklist.GetNumberOfIds()):
trgp = [0, 0, 0]
vpts.GetPoint(vtklist.GetId(j), trgp)
points.append(trgp)
if len(points) < 2: continue
points = np.array(points)
pointsmean = points.mean(axis=0) # plane center
uu, dd, vv = np.linalg.svd(points - pointsmean)
newp = np.dot(p - pointsmean, vv[0]) * vv[0] + pointsmean
variances.append(dd[1] + dd[2])
newline.append(newp)
if showNLines and not i % ndiv:
fline = fitLine(points, lw=4, alpha=1) # fitting plane
iapts = vs.points(points) # blue points
acts += [fline, iapts]
for i in range(ncoords):
vpts.SetPoint(i, newline[i])
if showNLines:
apts = vs.points(newline, c='r 0.6', r=2)
ass = vu.makeAssembly([apts] + acts)
return ass #NB: a demo actor is returned
setattr(actor, 'variances', np.array(variances))
return actor #NB: original actor is modified
def removeOutliers(points, radius, c='k', alpha=1, legend=None):
'''
Remove outliers from a cloud of points within radius search
'''
isactor = False
if isinstance(points, vtk.vtkActor):
isactor = True
poly = vu.polydata(points)
else:
src = vtk.vtkPointSource()
src.SetNumberOfPoints(len(points))
src.Update()
vpts = src.GetOutput().GetPoints()
for i, p in enumerate(points):
vpts.SetPoint(i, p)
poly = src.GetOutput()
removal = vtk.vtkRadiusOutlierRemoval()
vu.setInput(removal, poly)
removal.SetRadius(radius)
removal.SetNumberOfNeighbors(5)
removal.GenerateOutliersOff()
removal.Update()
rpoly = removal.GetOutput()
print("# of removed outlier points: ", removal.GetNumberOfPointsRemoved(),
'/', poly.GetNumberOfPoints())
outpts = []
for i in range(rpoly.GetNumberOfPoints()):
outpts.append(list(rpoly.GetPoint(i)))
outpts = np.array(outpts)
if not isactor: return outpts
actor = vs.points(outpts, c=c, alpha=alpha, legend=legend)
return actor # return same obj for concatenation
def smoothMLS3D(actors, neighbours=10):
'''
A time sequence of actors is being smoothed in 4D
using a MLS (Moving Least Squares) variant.
Time assciated to an actor must be specified in advance with actor.time(t).
Data itself can suggest a meaningful time separation based on the spatial
distribution of points.
neighbours, fixed nr of neighbours in space-time to take into account in fit.
'''
from scipy.spatial import KDTree
coords4d = []
for a in actors: # build the list of 4d coordinates
coords3d = a.coordinates()
n = len(coords3d)
pttimes = [[a.time()]]*n
coords4d += np.append(coords3d, pttimes, axis=1).tolist()
avedt = float(actors[-1].time()-actors[0].time())/len(actors)
print("Average time separation between actors dt =", round(avedt, 3))
coords4d = np.array(coords4d)
newcoords4d = []
kd = KDTree(coords4d, leafsize=neighbours)
suggest=''
pb = vio.ProgressBar(0, len(coords4d))
for i in pb.range():
mypt = coords4d[i]
#dr = np.sqrt(3*dx**2+dt**2)
#iclosest = kd.query_ball_point(mypt, r=dr)
#dists, iclosest = kd.query(mypt, k=None, distance_upper_bound=dr)
dists, iclosest = kd.query(mypt, k=neighbours)
closest = coords4d[iclosest]
nc = len(closest)
if nc >= neighbours and nc > 5:
m = np.linalg.lstsq(closest, [1.]*nc, rcond=None)[0]
vers = m/np.linalg.norm(m)
hpcenter = np.mean(closest, axis=0) # hyperplane center
dist = np.dot(mypt-hpcenter, vers)
projpt = mypt - dist*vers
newcoords4d.append(projpt)
if not i%1000: # work out some stats
v = np.std(closest, axis=0)
vx = round((v[0]+v[1]+v[2])/3, 3)
suggest='data suggest dt='+str(vx)
pb.print(suggest)
newcoords4d = np.array(newcoords4d)
ctimes = newcoords4d[:, 3]
ccoords3d = np.delete(newcoords4d, 3, axis=1) # get rid of time
act = vs.points(ccoords3d)
act.pointColors(ctimes, cmap='jet') # use a colormap to associate a color to time
return act
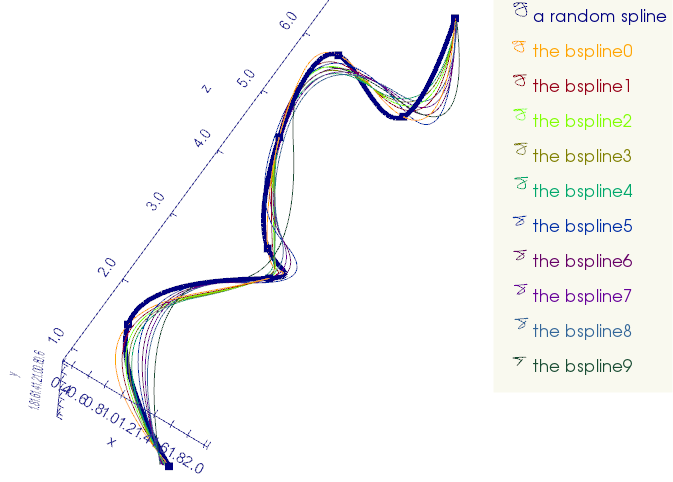
def spline(points, smooth=0.5, degree=2,
s=2, c='b', alpha=1., nodes=False, legend=None, res=20):
'''
Return a vtkActor for a spline that doesnt necessarly pass exactly throught all points.
Options:
smooth, smoothing factor:
0 = interpolate points exactly,
1 = average point positions
degree = degree of the spline (1<degree<5)
nodes = True shows also original the points
[**Example**](https://github.com/marcomusy/vtkplotter/blob/master/examples/tutorial.py)
'''
try:
from scipy.interpolate import splprep, splev
except ImportError:
vc.printc(
'Warning: ..scipy not installed, using vtkCardinalSpline instead.', c=5)
return _vtkspline(points, s, c, alpha, nodes, legend, res)
Nout = len(points)*res # Number of points on the spline
points = np.array(points)
minx, miny, minz = np.min(points, axis=0)
maxx, maxy, maxz = np.max(points, axis=0)
maxb = max(maxx-minx, maxy-miny, maxz-minz)
smooth *= maxb/2 # must be in absolute units
x, y, z = points[:, 0], points[:, 1], points[:, 2]
tckp, _ = splprep([x, y, z], task=0, s=smooth, k=degree) # find the knots
# evaluate spline, including interpolated points:
xnew, ynew, znew = splev(np.linspace(0, 1, Nout), tckp)
ppoints = vtk.vtkPoints() # Generate the polyline for the spline
profileData = vtk.vtkPolyData()
for i in range(Nout):
ppoints.InsertPoint(i, xnew[i], ynew[i], znew[i])
lines = vtk.vtkCellArray() # Create the polyline
lines.InsertNextCell(Nout)
for i in range(Nout):
lines.InsertCellPoint(i)
profileData.SetPoints(ppoints)
profileData.SetLines(lines)
actline = vu.makeActor(profileData, c=c, alpha=alpha, legend=legend)
actline.GetProperty().SetLineWidth(s)
if nodes:
actnodes = vs.points(points, r=5, c=c, alpha=alpha)
ass = vu.makeAssembly([actline, actnodes], legend=legend)
return ass
else:
return actline
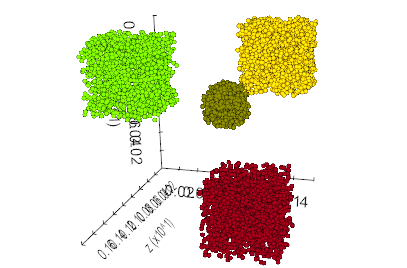
def cluster(points, radius, legend=None):
'''
Clustering of points in space.
radius, is the radius of local search.
Individual subsets can be accessed through actor.clusters
[**Example**](https://github.com/marcomusy/vtkplotter/blob/master/examples/basic/clustering.py)
'''
if isinstance(points, vtk.vtkActor):
poly = points.polydata()
else:
src = vtk.vtkPointSource()
src.SetNumberOfPoints(len(points))
src.Update()
vpts = src.GetOutput().GetPoints()
for i, p in enumerate(points):
vpts.SetPoint(i, p)
poly = src.GetOutput()
cluster = vtk.vtkEuclideanClusterExtraction()
cluster.SetInputData(poly)
cluster.SetExtractionModeToAllClusters()
cluster.SetRadius(radius)
cluster.ColorClustersOn()
cluster.Update()
idsarr = cluster.GetOutput().GetPointData().GetArray('ClusterId')
Nc = cluster.GetNumberOfExtractedClusters()
sets = [[] for i in range(Nc)]
for i, p in enumerate(points):
sets[idsarr.GetValue(i)].append(p)
acts = []
for i, aset in enumerate(sets):
acts.append(vs.points(aset, c=i))
actor = Assembly(acts, legend=legend)
actor.info['clusters'] = sets
print('Nr. of extracted clusters', Nc)
if Nc > 10:
print('First ten:')
for i in range(Nc):
if i > 9:
print('...')
break
print('Cluster #'+str(i)+', N =', len(sets[i]))
print('Access individual clusters through attribute: actor.cluster')
return actor
def cluster(points, radius, legend=None):
'''
Clustering of points in space.
radius, is the radius of local search.
Individual subsets can be accessed through actor.clusters
'''
if isinstance(points, vtk.vtkActor):
poly = vu.polydata(points)
else:
src = vtk.vtkPointSource()
src.SetNumberOfPoints(len(points))
src.Update()
vpts = src.GetOutput().GetPoints()
for i, p in enumerate(points):
vpts.SetPoint(i, p)
poly = src.GetOutput()
cluster = vtk.vtkEuclideanClusterExtraction()
vu.setInput(cluster, poly)
cluster.SetExtractionModeToAllClusters()
cluster.SetRadius(radius)
cluster.ColorClustersOn()
cluster.Update()
idsarr = cluster.GetOutput().GetPointData().GetArray('ClusterId')
Nc = cluster.GetNumberOfExtractedClusters()
sets = [[] for i in range(Nc)]
for i, p in enumerate(points):
sets[idsarr.GetValue(i)].append(p)
acts = []
for i, aset in enumerate(sets):
acts.append(vs.points(aset, c=i))
actor = vu.makeAssembly(acts, legend=legend)
setattr(actor, 'clusters', sets)
print('Nr. of extracted clusters', Nc)
if Nc > 10: print('First ten:')
for i in range(Nc):
if i > 9:
print('...')
break
print('Cluster #' + str(i) + ', N =', len(sets[i]))
print('Access individual clusters through attribute: actor.cluster')
return actor
def _vtkspline(points, s, c, alpha, nodes, legend, res):
numberOfOutputPoints = len(points)*res # Number of points on the spline
numberOfInputPoints = len(points) # One spline for each direction.
aSplineX = vtk.vtkCardinalSpline() # interpolate the x values
aSplineY = vtk.vtkCardinalSpline() # interpolate the y values
aSplineZ = vtk.vtkCardinalSpline() # interpolate the z values
inputPoints = vtk.vtkPoints()
for i in range(0, numberOfInputPoints):
x = points[i][0]
y = points[i][1]
z = points[i][2]
aSplineX.AddPoint(i, x)
aSplineY.AddPoint(i, y)
aSplineZ.AddPoint(i, z)
inputPoints.InsertPoint(i, x, y, z)
inputData = vtk.vtkPolyData()
inputData.SetPoints(inputPoints)
points = vtk.vtkPoints()
profileData = vtk.vtkPolyData()
for i in range(0, numberOfOutputPoints):
t = (numberOfInputPoints-1.)/(numberOfOutputPoints-1.)*i
x, y, z = aSplineX.Evaluate(
t), aSplineY.Evaluate(t), aSplineZ.Evaluate(t)
points.InsertPoint(i, x, y, z)
lines = vtk.vtkCellArray() # Create the polyline.
lines.InsertNextCell(numberOfOutputPoints)
for i in range(0, numberOfOutputPoints):
lines.InsertCellPoint(i)
profileData.SetPoints(points)
profileData.SetLines(lines)
actline = vu.makeActor(profileData, c=c, alpha=alpha, legend=legend)
actline.GetProperty().SetLineWidth(s)
actline.GetProperty().SetInterpolationToPhong()
if nodes:
pts = vu.coordinates(inputData)
actnodes = vs.points(pts, r=s*1.5, c=c, alpha=alpha)
ass = vu.makeAssembly([actline, actnodes], legend=legend)
return ass
else:
return actline
def smoothMLS1D(actor, f=0.2, showNLines=0):
'''
Smooth actor or points with a Moving Least Squares variant.
The list actor.variances contain the residue calculated for each point.
Input actor's polydata is modified.
Options:
f, smoothing factor - typical range s [0,2]
showNLines, build an actor showing the fitting line for N random points
[**Example1**](https://github.com/marcomusy/vtkplotter/blob/master/examples/advanced/moving_least_squares1D.py)
[**Example2**](https://github.com/marcomusy/vtkplotter/blob/master/examples/advanced/skeletonize.py)
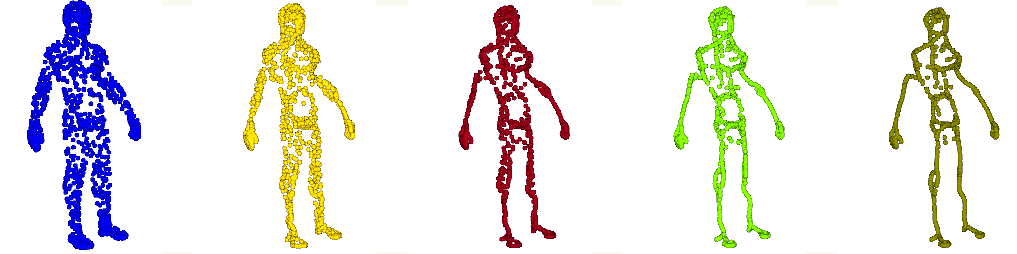
'''
coords = actor.coordinates()
ncoords = len(coords)
Ncp = int(ncoords*f/10)
nshow = int(ncoords)
if showNLines:
ndiv = int(nshow/showNLines)
if Ncp < 3:
vc.printc('Please choose a higher fraction than '+str(f), c=1)
Ncp = 3
poly = actor.polydata(True)
vpts = poly.GetPoints()
locator = vtk.vtkPointLocator()
locator.SetDataSet(poly)
locator.BuildLocator()
vtklist = vtk.vtkIdList()
variances, newline, acts = [], [], []
for i, p in enumerate(coords):
locator.FindClosestNPoints(Ncp, p, vtklist)
points = []
for j in range(vtklist.GetNumberOfIds()):
trgp = [0, 0, 0]
vpts.GetPoint(vtklist.GetId(j), trgp)
points.append(trgp)
if len(points) < 2:
continue
points = np.array(points)
pointsmean = points.mean(axis=0) # plane center
uu, dd, vv = np.linalg.svd(points-pointsmean)
newp = np.dot(p-pointsmean, vv[0])*vv[0] + pointsmean
variances.append(dd[1]+dd[2])
newline.append(newp)
if showNLines and not i % ndiv:
fline = fitLine(points, lw=4, alpha=1) # fitting plane
iapts = vs.points(points) # blue points
acts += [fline, iapts]
for i in range(ncoords):
vpts.SetPoint(i, newline[i])
if showNLines:
apts = vs.points(newline, c='r 0.6', r=2)
ass = Assembly([apts]+acts)
return ass # NB: a demo actor is returned
actor.info['variances'] = np.array(variances)
return actor # NB: original actor is modified
def smoothMLS2D(actor, f=0.2, decimate=1, recursive=0, showNPlanes=0):
'''
Smooth actor or points with a Moving Least Squares variant.
The list actor.variances contain the residue calculated for each point.
Input actor's polydata is modified.
Options:
f, smoothing factor - typical range s [0,2]
decimate, decimation factor (an integer number)
recursive, move points while algorithm proceedes
showNPlanes, build an actor showing the fitting plane for N random points
[**Example1**](https://github.com/marcomusy/vtkplotter/blob/master/examples/advanced/mesh_smoothers.py)
[**Example2**](https://github.com/marcomusy/vtkplotter/blob/master/examples/advanced/moving_least_squares2D.py)
[**Example3**](https://github.com/marcomusy/vtkplotter/blob/master/examples/advanced/recosurface.py)
'''
coords = actor.coordinates()
ncoords = len(coords)
Ncp = int(ncoords*f/100)
nshow = int(ncoords/decimate)
if showNPlanes:
ndiv = int(nshow/showNPlanes*decimate)
if Ncp < 5:
vc.printc('Please choose a higher fraction than '+str(f), c=1)
Ncp = 5
print('smoothMLS: Searching #neighbours, #pt:', Ncp, ncoords)
poly = actor.polydata(True)
vpts = poly.GetPoints()
locator = vtk.vtkPointLocator()
locator.SetDataSet(poly)
locator.BuildLocator()
vtklist = vtk.vtkIdList()
variances, newsurf, acts = [], [], []
pb = vio.ProgressBar(0, ncoords)
for i, p in enumerate(coords):
pb.print('smoothing...')
if i % decimate:
continue
locator.FindClosestNPoints(Ncp, p, vtklist)
points = []
for j in range(vtklist.GetNumberOfIds()):
trgp = [0, 0, 0]
vpts.GetPoint(vtklist.GetId(j), trgp)
points.append(trgp)
if len(points) < 5:
continue
points = np.array(points)
pointsmean = points.mean(axis=0) # plane center
uu, dd, vv = np.linalg.svd(points-pointsmean)
a, b, c = np.cross(vv[0], vv[1]) # normal
d, e, f = pointsmean # plane center
x, y, z = p
t = (a*d - a*x + b*e - b*y + c*f - c*z) # /(a*a+b*b+c*c)
newp = [x+t*a, y+t*b, z+t*c]
variances.append(dd[2])
newsurf.append(newp)
if recursive:
vpts.SetPoint(i, newp)
if showNPlanes and not i % ndiv:
plane = fitPlane(points, alpha=0.3) # fitting plane
iapts = vs.points(points) # blue points
acts += [plane, iapts]
if decimate == 1 and not recursive:
for i in range(ncoords):
vpts.SetPoint(i, newsurf[i])
actor.info['variances'] = np.array(variances)
if showNPlanes:
apts = vs.points(newsurf, c='r 0.6', r=2)
ass = Assembly([apts]+acts)
return ass # NB: a demo actor is returned
return actor # NB: original actor is modified
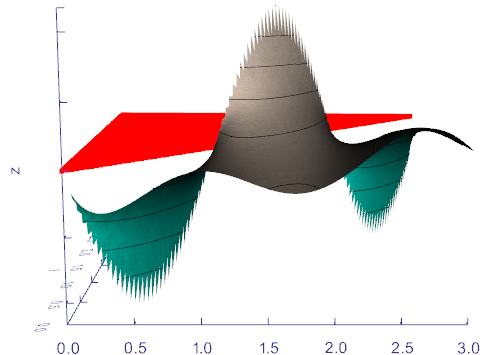
def fxy(z='sin(3*x)*log(x-y)/3', x=[0, 3], y=[0, 3],
zlimits=[None, None], showNan=True, zlevels=10, wire=False,
c='b', bc='aqua', alpha=1, legend=True, texture=None, res=100):
'''
Build a surface representing the 3D function specified as a string
or as a reference to an external function.
Red points indicate where the function does not exist (showNan).
zlevels will draw the specified number of z-levels contour lines.
[**Example**](https://github.com/marcomusy/vtkplotter/blob/master/examples/basic/fxy.py)
'''
if isinstance(z, str):
try:
z = z.replace('math.', '').replace('np.', '')
namespace = locals()
code = "from math import*\ndef zfunc(x,y): return "+z
exec(code, namespace)
z = namespace['zfunc']
except:
vc.printc('Syntax Error in fxy()', c=1)
return None
ps = vtk.vtkPlaneSource()
ps.SetResolution(res, res)
ps.SetNormal([0, 0, 1])
ps.Update()
poly = ps.GetOutput()
dx = x[1]-x[0]
dy = y[1]-y[0]
todel, nans = [], []
if zlevels:
tf = vtk.vtkTriangleFilter()
tf.SetInputData(poly)
tf.Update()
poly = tf.GetOutput()
for i in range(poly.GetNumberOfPoints()):
px, py, _ = poly.GetPoint(i)
xv = (px+.5)*dx+x[0]
yv = (py+.5)*dy+y[0]
try:
zv = z(xv, yv)
poly.GetPoints().SetPoint(i, [xv, yv, zv])
except:
todel.append(i)
nans.append([xv, yv, 0])
if len(todel):
cellIds = vtk.vtkIdList()
poly.BuildLinks()
for i in todel:
poly.GetPointCells(i, cellIds)
for j in range(cellIds.GetNumberOfIds()):
poly.DeleteCell(cellIds.GetId(j)) # flag cell
poly.RemoveDeletedCells()
cl = vtk.vtkCleanPolyData()
cl.SetInputData(poly)
cl.Update()
poly = cl.GetOutput()
if not poly.GetNumberOfPoints():
vc.printc('Function is not real in the domain', c=1)
return None
if zlimits[0]:
tmpact1 = Actor(poly)
a = tmpact1.cutPlane((0, 0, zlimits[0]), (0, 0, 1))
poly = a.polydata()
if zlimits[1]:
tmpact2 = Actor(poly)
a = tmpact2.cutPlane((0, 0, zlimits[1]), (0, 0, -1))
poly = a.polydata()
if c is None:
elev = vtk.vtkElevationFilter()
elev.SetInputData(poly)
elev.Update()
poly = elev.GetOutput()
actor = Actor(poly, c=c, bc=bc, alpha=alpha, wire=wire,
legend=legend, texture=texture)
acts = [actor]
if zlevels:
elevation = vtk.vtkElevationFilter()
elevation.SetInputData(poly)
bounds = poly.GetBounds()
elevation.SetLowPoint( 0, 0, bounds[4])
elevation.SetHighPoint(0, 0, bounds[5])
elevation.Update()
bcf = vtk.vtkBandedPolyDataContourFilter()
bcf.SetInputData(elevation.GetOutput())
bcf.SetScalarModeToValue()
bcf.GenerateContourEdgesOn()
bcf.GenerateValues(zlevels, elevation.GetScalarRange())
bcf.Update()
zpoly = bcf.GetContourEdgesOutput()
zbandsact = Actor(zpoly, c='k', alpha=alpha)
zbandsact.GetProperty().SetLineWidth(1.5)
acts.append(zbandsact)
if showNan and len(todel):
bb = actor.GetBounds()
zm = (bb[4]+bb[5])/2
nans = np.array(nans)+[0, 0, zm]
nansact = vs.points(nans, c='red', alpha=alpha/2)
acts.append(nansact)
if len(acts) > 1:
asse = Assembly(acts)
return asse
else:
return actor
def fxy(z='sin(3*x)*log(x-y)/3',
x=[0, 3],
y=[0, 3],
zlimits=[None, None],
showNan=True,
zlevels=10,
wire=False,
c='b',
bc='aqua',
alpha=1,
legend=True,
texture=None,
res=100):
'''
Build a surface representing the 3D function specified as a string
or as a reference to an external function.
Red points indicate where the function does not exist (showNan).
zlevels will draw the specified number of z-levels contour lines.
Examples:
vp = vtkplotter.Plotter()
vp.fxy('sin(3*x)*log(x-y)/3')
or
def z(x,y): return math.sin(x*y)
vp.fxy(z) # or equivalently:
vp.fxy(lambda x,y: math.sin(x*y))
'''
if isinstance(z, str):
try:
z = z.replace('math.', '').replace('np.', '')
namespace = locals()
code = "from math import*\ndef zfunc(x,y): return " + z
exec(code, namespace)
z = namespace['zfunc']
except:
vc.printc('Syntax Error in fxy()', 1)
return None
ps = vtk.vtkPlaneSource()
ps.SetResolution(res, res)
ps.SetNormal([0, 0, 1])
ps.Update()
poly = ps.GetOutput()
dx = x[1] - x[0]
dy = y[1] - y[0]
todel, nans = [], []
if zlevels:
tf = vtk.vtkTriangleFilter()
vu.setInput(tf, poly)
tf.Update()
poly = tf.GetOutput()
for i in range(poly.GetNumberOfPoints()):
px, py, _ = poly.GetPoint(i)
xv = (px + .5) * dx + x[0]
yv = (py + .5) * dy + y[0]
try:
zv = z(xv, yv)
poly.GetPoints().SetPoint(i, [xv, yv, zv])
except:
todel.append(i)
nans.append([xv, yv, 0])
if len(todel):
cellIds = vtk.vtkIdList()
poly.BuildLinks()
for i in todel:
poly.GetPointCells(i, cellIds)
for j in range(cellIds.GetNumberOfIds()):
poly.DeleteCell(cellIds.GetId(j)) #flag cell
poly.RemoveDeletedCells()
cl = vtk.vtkCleanPolyData()
vu.setInput(cl, poly)
cl.Update()
poly = cl.GetOutput()
if not poly.GetNumberOfPoints():
vc.printc('Function is not real in the domain', 1)
return vtk.vtkActor()
if zlimits[0]:
a = vu.cutPlane(poly, (0, 0, zlimits[0]), (0, 0, 1))
poly = vu.polydata(a)
if zlimits[1]:
a = vu.cutPlane(poly, (0, 0, zlimits[1]), (0, 0, -1))
poly = vu.polydata(a)
if c is None:
elev = vtk.vtkElevationFilter()
vu.setInput(elev, poly)
elev.Update()
poly = elev.GetOutput()
actor = vu.makeActor(poly,
c=c,
bc=bc,
alpha=alpha,
wire=wire,
legend=legend,
texture=texture)
acts = [actor]
if zlevels:
elevation = vtk.vtkElevationFilter()
vu.setInput(elevation, poly)
bounds = poly.GetBounds()
elevation.SetLowPoint(0, 0, bounds[4])
elevation.SetHighPoint(0, 0, bounds[5])
elevation.Update()
bcf = vtk.vtkBandedPolyDataContourFilter()
vu.setInput(bcf, elevation.GetOutput())
bcf.SetScalarModeToValue()
bcf.GenerateContourEdgesOn()
bcf.GenerateValues(zlevels, elevation.GetScalarRange())
bcf.Update()
zpoly = bcf.GetContourEdgesOutput()
zbandsact = vu.makeActor(zpoly, c='k', alpha=alpha)
zbandsact.GetProperty().SetLineWidth(1.5)
acts.append(zbandsact)
if showNan and len(todel):
bb = actor.GetBounds()
zm = (bb[4] + bb[5]) / 2
nans = np.array(nans) + [0, 0, zm]
nansact = vs.points(nans, c='red', alpha=alpha / 2)
acts.append(nansact)
if len(acts) > 1:
asse = vu.makeAssembly(acts)
return asse
else:
return actor