def recoSurface(points, bins=256,
c='gold', alpha=1, wire=False, bc='t', legend=None):
'''
Surface reconstruction from sparse points.
[**Example**](https://github.com/marcomusy/vtkplotter/blob/master/examples/advanced/recosurface.py)
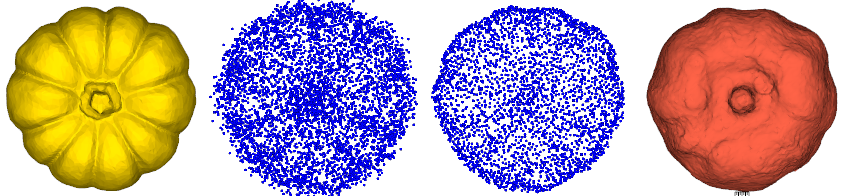
'''
if isinstance(points, vtk.vtkActor):
points = points.coordinates()
N = len(points)
if N < 50:
print('recoSurface: Use at least 50 points.')
return None
points = np.array(points)
ptsSource = vtk.vtkPointSource()
ptsSource.SetNumberOfPoints(N)
ptsSource.Update()
vpts = ptsSource.GetOutput().GetPoints()
for i, p in enumerate(points):
vpts.SetPoint(i, p)
polyData = ptsSource.GetOutput()
distance = vtk.vtkSignedDistance()
f = 0.1
x0, x1, y0, y1, z0, z1 = polyData.GetBounds()
distance.SetBounds(x0-(x1-x0)*f, x1+(x1-x0)*f,
y0-(y1-y0)*f, y1+(y1-y0)*f,
z0-(z1-z0)*f, z1+(z1-z0)*f)
if polyData.GetPointData().GetNormals():
distance.SetInputData(polyData)
else:
normals = vtk.vtkPCANormalEstimation()
normals.SetInputData(polyData)
normals.SetSampleSize(int(N/50))
normals.SetNormalOrientationToGraphTraversal()
distance.SetInputConnection(normals.GetOutputPort())
print('Recalculating normals for', N,
'points, sample size=', int(N/50))
b = polyData.GetBounds()
diagsize = np.sqrt((b[1]-b[0])**2 + (b[3]-b[2])**2 + (b[5]-b[4])**2)
radius = diagsize/bins*5
distance.SetRadius(radius)
distance.SetDimensions(bins, bins, bins)
distance.Update()
print('Calculating mesh from points with R =', radius)
surface = vtk.vtkExtractSurface()
surface.SetRadius(radius * .99)
surface.HoleFillingOn()
surface.ComputeNormalsOff()
surface.ComputeGradientsOff()
surface.SetInputConnection(distance.GetOutputPort())
surface.Update()
return Actor(surface.GetOutput(), c, alpha, wire, bc, legend)
def recoSurface(points,
bins=256,
c='gold',
alpha=1,
wire=False,
bc='t',
edges=False,
legend=None):
'''
Surface reconstruction from sparse points.
'''
if isinstance(points, vtk.vtkActor): points = vu.coordinates(points)
N = len(points)
if N < 50:
print('recoSurface: Use at least 50 points.')
return None
points = np.array(points)
ptsSource = vtk.vtkPointSource()
ptsSource.SetNumberOfPoints(N)
ptsSource.Update()
vpts = ptsSource.GetOutput().GetPoints()
for i, p in enumerate(points):
vpts.SetPoint(i, p)
polyData = ptsSource.GetOutput()
distance = vtk.vtkSignedDistance()
f = 0.1
x0, x1, y0, y1, z0, z1 = polyData.GetBounds()
distance.SetBounds(x0 - (x1 - x0) * f, x1 + (x1 - x0) * f,
y0 - (y1 - y0) * f, y1 + (y1 - y0) * f,
z0 - (z1 - z0) * f, z1 + (z1 - z0) * f)
if polyData.GetPointData().GetNormals():
distance.SetInputData(polyData)
vu.setInput(distance, polyData)
else:
normals = vtk.vtkPCANormalEstimation()
vu.setInput(normals, polyData)
normals.SetSampleSize(int(N / 50))
normals.SetNormalOrientationToGraphTraversal()
distance.SetInputConnection(normals.GetOutputPort())
print('Recalculating normals for', N, 'points, sample size=',
int(N / 50))
radius = vu.diagonalSize(polyData) / bins * 5
distance.SetRadius(radius)
distance.SetDimensions(bins, bins, bins)
distance.Update()
print('Calculating mesh from points with R =', radius)
surface = vtk.vtkExtractSurface()
surface.SetRadius(radius * .99)
surface.HoleFillingOn()
surface.ComputeNormalsOff()
surface.ComputeGradientsOff()
surface.SetInputConnection(distance.GetOutputPort())
surface.Update()
return vu.makeActor(surface.GetOutput(), c, alpha, wire, bc, edges, legend)
def __init__(self, input, toggle_normals, sample):
self._norms = vtk.vtkPCANormalEstimation()
self._norms.SetInputConnection(input.GetOutputPort())
self._norms.SetSampleSize(sample)
if toggle_normals:
self._norms.FlipNormalsOn()
else:
self._norms.FlipNormalsOff()
self._norms.SetNormalOrientationToGraphTraversal()
def create_surface_actor(points, n=None, orientationPoint=None, negate=False):
"""Generate point normals using PCA (principal component analysis).
Basically this estimates a local tangent plane around each sample point p
by considering a small neighborhood of points around p, and fitting a plane
to the neighborhood (via PCA).
:param int n: neighborhood size to calculate the normal
:param list orientationPoint: adjust the +/- sign of the normals so that
the normals all point towards a specified point. If None, perform a traversal
of the point cloud and flip neighboring normals so that they are mutually consistent.
:param bool negate: flip all normals
"""
if n is not None:
sampleSize = n
else:
sampleSize = points.GetNumberOfPoints() * .00005
if sampleSize < 10:
sampleSize = 10
polydata = vtk.vtkPolyData()
polydata.SetPoints(points)
print('Estimating normals using PCANormalEstimation')
normals = vtk.vtkPCANormalEstimation()
normals.SetInputData(polydata)
normals.SetSampleSize(sampleSize)
if orientationPoint is not None:
normals.SetNormalOrientationToPoint()
normals.SetOrientationPoint(orientationPoint)
else:
normals.SetNormalOrientationToGraphTraversal()
if negate:
normals.FlipNormalsOn()
normals.Update()
points_array = vtk_to_numpy(points.GetData())
normals_array = vtk_to_numpy(
normals.GetOutput().GetPointData().GetNormals())
faces, vertices = poisson_reconstruction(points_array,
normals_array,
depth=10)
return create_mesh_actor(vertices, faces)
def normal_estimation_visual(filename, ply=None):
'''
filename:文件名
顶点的法线评估
'''
reader = vtk.vtkSimplePointsReader()
reader.SetFileName(filename)
reader.Update()
polyData = reader.GetOutput()
sampleSize = polyData.GetNumberOfPoints() * .00005
if sampleSize < 10:
sampleSize = 10
print('Estimating normals using PCANormalEstimation')
normals = vtk.vtkPCANormalEstimation()
normals.SetInputData(polyData)
normals.SetSampleSize(sampleSize)
normals.SetNormalOrientationToGraphTraversal()
normals.FlipNormalsOff()
normals.Update()
render(normals.GetOutput(), None, ply)
def normal_estimation_write(infile, outfile):
'''
infile:string, 输入的文件路径
outfile:string,输出的文件路径
'''
reader = vtk.vtkSimplePointsReader()
reader.SetFileName(infile)
reader.Update()
polyData = reader.GetOutput()
sampleSize = polyData.GetNumberOfPoints() * .00005
if sampleSize < 10:
sampleSize = 10
print('Estimating normals using PCANormalEstimation')
normals = vtk.vtkPCANormalEstimation()
normals.SetInputData(polyData)
normals.SetSampleSize(sampleSize)
normals.SetNormalOrientationToGraphTraversal()
normals.FlipNormalsOn()
normals.Update()
output = normals.GetOutput()
arr_normal = output.GetPointData().GetNormals()
num = arr_normal.GetNumberOfTuples()
f = codecs.open(outfile, "w")
for index in range(num):
for i in range(3):
f.write("%.6f " % polyData.GetPoint(index)[i])
for i in range(2):
f.write("%.6f " % arr_normal.GetTuple(index)[i])
f.write("%.6f\n" % arr_normal.GetTuple(index)[2])
f.close()
points.Update()
# Create a sphere implicit function
sphere = vtk.vtkSphere()
sphere.SetCenter(0,0,0)
sphere.SetRadius(0.75)
# Extract points along sphere surface
extract = vtk.vtkFitImplicitFunction()
extract.SetInputConnection(points.GetOutputPort())
extract.SetImplicitFunction(sphere)
extract.SetThreshold(0.005)
extract.Update()
# Now generate normals from resulting points
norms = vtk.vtkPCANormalEstimation()
norms.SetInputConnection(extract.GetOutputPort())
norms.SetSampleSize(20)
norms.FlipNormalsOn()
norms.SetNormalOrientationToPoint()
norms.SetOrientationPoint(0,0,0)
# Time execution
timer = vtk.vtkTimerLog()
timer.StartTimer()
norms.Update()
timer.StopTimer()
time = timer.GetElapsedTime()
print("Points processed: {0}".format(NPts))
print(" Time to generate normals: {0}".format(time))
#print(hBin)
points.Update()
# Create a sphere implicit function
sphere = vtk.vtkSphere()
sphere.SetCenter(0,0,0)
sphere.SetRadius(0.75)
# Extract points along sphere surface
extract = vtk.vtkFitImplicitFunction()
extract.SetInputConnection(points.GetOutputPort())
extract.SetImplicitFunction(sphere)
extract.SetThreshold(0.005)
extract.Update()
# Now generate normals from resulting points
norms = vtk.vtkPCANormalEstimation()
norms.SetInputConnection(extract.GetOutputPort())
norms.SetSampleSize(20)
norms.FlipNormalsOn()
norms.SetNormalOrientationToGraphTraversal()
# Time execution
timer = vtk.vtkTimerLog()
timer.StartTimer()
norms.Update()
timer.StopTimer()
time = timer.GetElapsedTime()
print("Points processed: {0}".format(NPts))
print(" Time to generate normals: {0}".format(time))
#print(hBin)
#print(hBin.GetOutput())
def main(argv):
colors = vtk.vtkNamedColors()
polyData = ReadPolyData({True: argv[1], False: ""}[len(argv) > 1])
bounds = polyData.GetBounds()
rng = [0, 0, 0]
for i in range(3):
rng[i] = bounds[2 * i + 1] - bounds[2 * i]
sampleSize = polyData.GetNumberOfPoints() * .00005
if (sampleSize < 10):
sampleSize = 10
print("Sample size is: %d" % (sampleSize))
normals = vtk.vtkPCANormalEstimation()
normals.SetInputData(polyData)
normals.SetSampleSize(sampleSize)
normals.SetNormalOrientationToGraphTraversal()
normals.FlipNormalsOn()
print("Range: %f, %f, %f" % (rng[0], rng[1], rng[2]))
dimension = 256
dimension = 128
radius = rng[0] / float(dimension) * 5 # ~5 voxels
print("Radius: %f" % (radius))
distance = vtk.vtkSignedDistance()
distance.SetInputConnection(normals.GetOutputPort())
distance.SetRadius(radius)
distance.SetDimensions(dimension, dimension, dimension)
distance.SetBounds(bounds[0] - rng[0] * 0.1, bounds[1] + rng[0] * 0.1,
bounds[2] - rng[1] * 0.1, bounds[3] + rng[1] * 0.1,
bounds[4] - rng[2] * 0.1, bounds[5] + rng[2] * 0.1)
# Create a lookup table that consists of the full hue circle
# (from HSV).
belowRangeColor = colors.GetColor4d("Black")
belowRangeColor[3] = 0.2
aboveRangeColor = colors.GetColor4d("White")
aboveRangeColor[3] = 0.2
hueLut = vtk.vtkLookupTable()
hueLut.SetTableRange(-0.99 * radius, 0.99 * radius)
hueLut.SetHueRange(0.667, 0)
hueLut.SetSaturationRange(1, 1)
hueLut.SetValueRange(1, 1)
hueLut.UseBelowRangeColorOn()
hueLut.SetBelowRangeColor(belowRangeColor)
hueLut.UseAboveRangeColorOn()
hueLut.SetAboveRangeColor(aboveRangeColor)
hueLut.SetNumberOfColors(5)
hueLut.Build()
last = hueLut.GetTableValue(4)
hueLut.SetAboveRangeColor(last[0], last[1], last[2], 0)
sagittalColors = vtk.vtkImageMapToColors()
sagittalColors.SetInputConnection(distance.GetOutputPort())
sagittalColors.SetLookupTable(hueLut)
sagittalColors.Update()
sagittal = vtk.vtkImageActor()
sagittal.GetMapper().SetInputConnection(sagittalColors.GetOutputPort())
sagittal.SetDisplayExtent(dimension // 2, dimension // 2, 0, dimension - 1,
0, dimension - 1)
sagittal.ForceOpaqueOn()
axialColors = vtk.vtkImageMapToColors()
axialColors.SetInputConnection(distance.GetOutputPort())
axialColors.SetLookupTable(hueLut)
axialColors.Update()
axial = vtk.vtkImageActor()
axial.GetMapper().SetInputConnection(axialColors.GetOutputPort())
axial.SetDisplayExtent(0, dimension - 1, 0, dimension - 1, dimension // 2,
dimension // 2)
axial.ForceOpaqueOn()
coronalColors = vtk.vtkImageMapToColors()
coronalColors.SetInputConnection(distance.GetOutputPort())
coronalColors.SetLookupTable(hueLut)
coronalColors.Update()
coronal = vtk.vtkImageActor()
coronal.GetMapper().SetInputConnection(coronalColors.GetOutputPort())
coronal.SetDisplayExtent(0, dimension - 1, dimension // 2, dimension // 2,
0, dimension - 1)
coronal.ForceOpaqueOn()
# Create a scalar bar
scalarBar = vtk.vtkScalarBarActor()
scalarBar.SetLookupTable(hueLut)
scalarBar.SetTitle("Distance")
scalarBar.SetNumberOfLabels(5)
# Create graphics stuff
#
ren1 = vtk.vtkRenderer()
ren1.SetBackground(colors.GetColor3d("CornflowerBlue"))
renWin = vtk.vtkRenderWindow()
renWin.AddRenderer(ren1)
renWin.SetSize(600, 400)
renWin.SetWindowName("SignedDistance")
iren = vtk.vtkRenderWindowInteractor()
iren.SetRenderWindow(renWin)
# Add the actors to the renderer, set the background and size
#
ren1.AddActor(sagittal)
ren1.AddActor(axial)
ren1.AddActor(coronal)
ren1.AddActor2D(scalarBar)
# Generate an interesting view
#
ren1.ResetCamera()
ren1.GetActiveCamera().Azimuth(120)
ren1.GetActiveCamera().Elevation(30)
ren1.GetActiveCamera().Dolly(1.5)
ren1.ResetCameraClippingRange()
renWin.Render()
iren.Initialize()
iren.Start()
print("%f, %f" % (distance.GetOutput().GetScalarRange()[0],
distance.GetOutput().GetScalarRange()[1]))
return distance