def signedDistanceFromPointCloud(mesh,
maxradius=None,
bounds=None,
dims=(20, 20, 20)):
"""
Compute signed distances over a volume from an input point cloud.
The output is a ``Volume`` object whose voxels contains the signed distance from
the cloud.
:param float maxradius: how far out to propagate distance calculation
:param list bounds: volume bounds.
:param list dims: dimensions (nr. of voxels) of the output volume.
"""
if bounds is None:
bounds = mesh.GetBounds()
if maxradius is None:
maxradius = mesh.diagonalSize() / 10.
dist = vtk.vtkSignedDistance()
dist.SetInputData(mesh.polydata(True))
dist.SetRadius(maxradius)
dist.SetBounds(bounds)
dist.SetDimensions(dims)
dist.Update()
vol = Volume(dist.GetOutput())
vol.name = "signedDistanceVolume"
return vol
def recoSurface(points, bins=256,
c='gold', alpha=1, wire=False, bc='t', legend=None):
'''
Surface reconstruction from sparse points.
[**Example**](https://github.com/marcomusy/vtkplotter/blob/master/examples/advanced/recosurface.py)
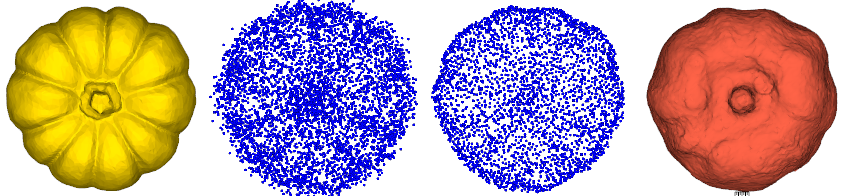
'''
if isinstance(points, vtk.vtkActor):
points = points.coordinates()
N = len(points)
if N < 50:
print('recoSurface: Use at least 50 points.')
return None
points = np.array(points)
ptsSource = vtk.vtkPointSource()
ptsSource.SetNumberOfPoints(N)
ptsSource.Update()
vpts = ptsSource.GetOutput().GetPoints()
for i, p in enumerate(points):
vpts.SetPoint(i, p)
polyData = ptsSource.GetOutput()
distance = vtk.vtkSignedDistance()
f = 0.1
x0, x1, y0, y1, z0, z1 = polyData.GetBounds()
distance.SetBounds(x0-(x1-x0)*f, x1+(x1-x0)*f,
y0-(y1-y0)*f, y1+(y1-y0)*f,
z0-(z1-z0)*f, z1+(z1-z0)*f)
if polyData.GetPointData().GetNormals():
distance.SetInputData(polyData)
else:
normals = vtk.vtkPCANormalEstimation()
normals.SetInputData(polyData)
normals.SetSampleSize(int(N/50))
normals.SetNormalOrientationToGraphTraversal()
distance.SetInputConnection(normals.GetOutputPort())
print('Recalculating normals for', N,
'points, sample size=', int(N/50))
b = polyData.GetBounds()
diagsize = np.sqrt((b[1]-b[0])**2 + (b[3]-b[2])**2 + (b[5]-b[4])**2)
radius = diagsize/bins*5
distance.SetRadius(radius)
distance.SetDimensions(bins, bins, bins)
distance.Update()
print('Calculating mesh from points with R =', radius)
surface = vtk.vtkExtractSurface()
surface.SetRadius(radius * .99)
surface.HoleFillingOn()
surface.ComputeNormalsOff()
surface.ComputeGradientsOff()
surface.SetInputConnection(distance.GetOutputPort())
surface.Update()
return Actor(surface.GetOutput(), c, alpha, wire, bc, legend)
def recoSurface(points,
bins=256,
c='gold',
alpha=1,
wire=False,
bc='t',
edges=False,
legend=None):
'''
Surface reconstruction from sparse points.
'''
if isinstance(points, vtk.vtkActor): points = vu.coordinates(points)
N = len(points)
if N < 50:
print('recoSurface: Use at least 50 points.')
return None
points = np.array(points)
ptsSource = vtk.vtkPointSource()
ptsSource.SetNumberOfPoints(N)
ptsSource.Update()
vpts = ptsSource.GetOutput().GetPoints()
for i, p in enumerate(points):
vpts.SetPoint(i, p)
polyData = ptsSource.GetOutput()
distance = vtk.vtkSignedDistance()
f = 0.1
x0, x1, y0, y1, z0, z1 = polyData.GetBounds()
distance.SetBounds(x0 - (x1 - x0) * f, x1 + (x1 - x0) * f,
y0 - (y1 - y0) * f, y1 + (y1 - y0) * f,
z0 - (z1 - z0) * f, z1 + (z1 - z0) * f)
if polyData.GetPointData().GetNormals():
distance.SetInputData(polyData)
vu.setInput(distance, polyData)
else:
normals = vtk.vtkPCANormalEstimation()
vu.setInput(normals, polyData)
normals.SetSampleSize(int(N / 50))
normals.SetNormalOrientationToGraphTraversal()
distance.SetInputConnection(normals.GetOutputPort())
print('Recalculating normals for', N, 'points, sample size=',
int(N / 50))
radius = vu.diagonalSize(polyData) / bins * 5
distance.SetRadius(radius)
distance.SetDimensions(bins, bins, bins)
distance.Update()
print('Calculating mesh from points with R =', radius)
surface = vtk.vtkExtractSurface()
surface.SetRadius(radius * .99)
surface.HoleFillingOn()
surface.ComputeNormalsOff()
surface.ComputeGradientsOff()
surface.SetInputConnection(distance.GetOutputPort())
surface.Update()
return vu.makeActor(surface.GetOutput(), c, alpha, wire, bc, edges, legend)
def __init__(self,
infile,
grid,
radius=2,
offset=(0., 0., 0.),
toggle_normals=False,
sample=20):
# Catch non-3D grids
if np.shape(grid.dimensions) != (3, ):
dim_count = np.shape(grid.dimensions)[0]
dim_err = "The specified grid has {:n} dimensions, 3 are required"
raise ValueError(dim_err.format(dim_count))
self._grid = grid
self._offset = offset
self._reader = PolyReader(infile)
self._norms = NormalCalculator(self._reader, toggle_normals, sample)
self._dist = vtk.vtkSignedDistance()
self._dist.SetInputConnection(self._norms.GetOutputPort())
self._dist.SetRadius(radius * grid.spacing[0])
self._dist.SetBounds(self._get_bounds())
self._dist.SetDimensions(self._grid.shape)
self._dist.Update()
# Get the SDF as an array
sdf_array = dsa.WrapDataObject(self._dist.GetOutput())
# Reshape the array to the grid
sdf_cube = np.reshape(sdf_array.PointData['ImageScalars'],
self._grid.shape[::-1])
# Swap axis to get [x, y, z] order
self._array = np.swapaxes(sdf_cube, 0, 2)
A mixed example with class vtkSignedDistance: generate a scalar field by the signed distance from a polydata, save it to stack.tif file, then extract an isosurface from the 3d image. """ from vtkplotter import Plotter, Points, Text, datadir vp = Plotter(verbose=0) act = vp.load(datadir + "290.vtk").normalize().subdivide().computeNormals() # Generate signed distance function and contour it import vtk dist = vtk.vtkSignedDistance() dist.SetInputData(act.polydata()) dist.SetRadius(0.2) # how far out to propagate distance calculation dist.SetBounds(-2, 2, -2, 2, -2, 2) dist.SetDimensions(80, 80, 80) dist.Update() # vp.write(dist.GetOutput(), 'stack.tif') fe = vtk.vtkExtractSurface() fe.SetInputConnection(dist.GetOutputPort()) fe.SetRadius(0.2) # this should match the signed distance radius fe.Update() pts = Points(act.coordinates())
norms.FlipNormalsOff() norms.SetNormalOrientationToGraphTraversal() #norms.SetNormalOrientationToPoint() #norms.SetOrientationPoint(0.3,0.3,0.3) norms.Update() subMapper = vtk.vtkPointGaussianMapper() subMapper.SetInputConnection(extract.GetOutputPort()) subMapper.EmissiveOff() subMapper.SetScaleFactor(0.0) subActor = vtk.vtkActor() subActor.SetMapper(subMapper) # Generate signed distance function and contour it dist = vtk.vtkSignedDistance() dist.SetInputConnection(norms.GetOutputPort()) dist.SetRadius(0.1) #how far out to propagate distance calculation dist.SetBounds(-1,1, -1,1, -1,1) dist.SetDimensions(50,50,50) # Extract the surface with modified flying edges #fe = vtk.vtkFlyingEdges3D() #fe.SetValue(0,0.0) fe = vtk.vtkExtractSurface() fe.SetInputConnection(dist.GetOutputPort()) fe.SetRadius(0.1) # this should match the signed distance radius # Time the execution timer = vtk.vtkTimerLog() timer.StartTimer()
def main(argv):
colors = vtk.vtkNamedColors()
polyData = ReadPolyData({True: argv[1], False: ""}[len(argv) > 1])
bounds = polyData.GetBounds()
rng = [0, 0, 0]
for i in range(3):
rng[i] = bounds[2 * i + 1] - bounds[2 * i]
sampleSize = polyData.GetNumberOfPoints() * .00005
if (sampleSize < 10):
sampleSize = 10
print("Sample size is: %d" % (sampleSize))
normals = vtk.vtkPCANormalEstimation()
normals.SetInputData(polyData)
normals.SetSampleSize(sampleSize)
normals.SetNormalOrientationToGraphTraversal()
normals.FlipNormalsOn()
print("Range: %f, %f, %f" % (rng[0], rng[1], rng[2]))
dimension = 256
dimension = 128
radius = rng[0] / float(dimension) * 5 # ~5 voxels
print("Radius: %f" % (radius))
distance = vtk.vtkSignedDistance()
distance.SetInputConnection(normals.GetOutputPort())
distance.SetRadius(radius)
distance.SetDimensions(dimension, dimension, dimension)
distance.SetBounds(bounds[0] - rng[0] * 0.1, bounds[1] + rng[0] * 0.1,
bounds[2] - rng[1] * 0.1, bounds[3] + rng[1] * 0.1,
bounds[4] - rng[2] * 0.1, bounds[5] + rng[2] * 0.1)
# Create a lookup table that consists of the full hue circle
# (from HSV).
belowRangeColor = colors.GetColor4d("Black")
belowRangeColor[3] = 0.2
aboveRangeColor = colors.GetColor4d("White")
aboveRangeColor[3] = 0.2
hueLut = vtk.vtkLookupTable()
hueLut.SetTableRange(-0.99 * radius, 0.99 * radius)
hueLut.SetHueRange(0.667, 0)
hueLut.SetSaturationRange(1, 1)
hueLut.SetValueRange(1, 1)
hueLut.UseBelowRangeColorOn()
hueLut.SetBelowRangeColor(belowRangeColor)
hueLut.UseAboveRangeColorOn()
hueLut.SetAboveRangeColor(aboveRangeColor)
hueLut.SetNumberOfColors(5)
hueLut.Build()
last = hueLut.GetTableValue(4)
hueLut.SetAboveRangeColor(last[0], last[1], last[2], 0)
sagittalColors = vtk.vtkImageMapToColors()
sagittalColors.SetInputConnection(distance.GetOutputPort())
sagittalColors.SetLookupTable(hueLut)
sagittalColors.Update()
sagittal = vtk.vtkImageActor()
sagittal.GetMapper().SetInputConnection(sagittalColors.GetOutputPort())
sagittal.SetDisplayExtent(dimension // 2, dimension // 2, 0, dimension - 1,
0, dimension - 1)
sagittal.ForceOpaqueOn()
axialColors = vtk.vtkImageMapToColors()
axialColors.SetInputConnection(distance.GetOutputPort())
axialColors.SetLookupTable(hueLut)
axialColors.Update()
axial = vtk.vtkImageActor()
axial.GetMapper().SetInputConnection(axialColors.GetOutputPort())
axial.SetDisplayExtent(0, dimension - 1, 0, dimension - 1, dimension // 2,
dimension // 2)
axial.ForceOpaqueOn()
coronalColors = vtk.vtkImageMapToColors()
coronalColors.SetInputConnection(distance.GetOutputPort())
coronalColors.SetLookupTable(hueLut)
coronalColors.Update()
coronal = vtk.vtkImageActor()
coronal.GetMapper().SetInputConnection(coronalColors.GetOutputPort())
coronal.SetDisplayExtent(0, dimension - 1, dimension // 2, dimension // 2,
0, dimension - 1)
coronal.ForceOpaqueOn()
# Create a scalar bar
scalarBar = vtk.vtkScalarBarActor()
scalarBar.SetLookupTable(hueLut)
scalarBar.SetTitle("Distance")
scalarBar.SetNumberOfLabels(5)
# Create graphics stuff
#
ren1 = vtk.vtkRenderer()
ren1.SetBackground(colors.GetColor3d("CornflowerBlue"))
renWin = vtk.vtkRenderWindow()
renWin.AddRenderer(ren1)
renWin.SetSize(600, 400)
renWin.SetWindowName("SignedDistance")
iren = vtk.vtkRenderWindowInteractor()
iren.SetRenderWindow(renWin)
# Add the actors to the renderer, set the background and size
#
ren1.AddActor(sagittal)
ren1.AddActor(axial)
ren1.AddActor(coronal)
ren1.AddActor2D(scalarBar)
# Generate an interesting view
#
ren1.ResetCamera()
ren1.GetActiveCamera().Azimuth(120)
ren1.GetActiveCamera().Elevation(30)
ren1.GetActiveCamera().Dolly(1.5)
ren1.ResetCameraClippingRange()
renWin.Render()
iren.Initialize()
iren.Start()
print("%f, %f" % (distance.GetOutput().GetScalarRange()[0],
distance.GetOutput().GetScalarRange()[1]))
return distance
