def scraper():
if request.method == 'POST':
site = request.form['myUrl']
session = HTMLSession()
abs_urls = session.get(site).html.absolute_links
helpers.process_data(abs_urls)
print(abs_urls)
return render_template('index.html', links=abs_urls)
else:
return render_template('index.html')
def cross_validation(y, x, k_indices, k, regression_method, **args):
"""
Completes k-fold cross-validation using the regression method
passed as argument.
"""
# get k'th subgroup in test, others in train
msk_test = k_indices[k]
msk_train = np.delete(k_indices, (k), axis=0).ravel()
x_train = x[msk_train, :]
x_test = x[msk_test, :]
y_train = y[msk_train]
y_test = y[msk_test]
# data pre-processing
x_train, x_test = process_data(x_train, x_test, True)
# compute weights using given method
weights, loss = regression_method(y=y_train, tx=x_train, **args)
# predict output for train and test data
y_train_pred = predict_labels(weights, x_train)
y_test_pred = predict_labels(weights, x_test)
# compute accuracy for train and test data
acc_train = compute_accuracy(y_train_pred, y_train)
acc_test = compute_accuracy(y_test_pred, y_test)
return acc_train, acc_test
def cross_validation_ridge_regression(y, x, k_indices, k, lambdas, degrees):
"""
Completes k-fold cross-validation using the ridge regression method.
Here, we build polynomial features and create four subsets using
the jet feature.
"""
# get k'th subgroup in test, others in train
msk_test = k_indices[k]
msk_train = np.delete(k_indices, (k), axis=0).ravel()
x_train_all_jets = x[msk_train, :]
x_test_all_jets = x[msk_test, :]
y_train_all_jets = y[msk_train]
y_test_all_jets = y[msk_test]
# split in 4 subsets the training set
msk_jets_train = get_jet_masks(x_train_all_jets)
msk_jets_test = get_jet_masks(x_test_all_jets)
# initialize output vectors
y_train_pred = np.zeros(len(y_train_all_jets))
y_test_pred = np.zeros(len(y_test_all_jets))
for idx in range(len(msk_jets_train)):
x_train = x_train_all_jets[msk_jets_train[idx]]
x_test = x_test_all_jets[msk_jets_test[idx]]
y_train = y_train_all_jets[msk_jets_train[idx]]
# data pre-processing
x_train, x_test = process_data(x_train, x_test, False)
phi_train = build_poly(x_train, degrees[idx])
phi_test = build_poly(x_test, degrees[idx])
phi_train = add_constant_column(phi_train)
phi_test = add_constant_column(phi_test)
# compute weights using given method
weights, loss = ridge_regression(y=y_train, tx=phi_train, lambda_=lambdas[idx])
y_train_pred[msk_jets_train[idx]] = predict_labels(weights, phi_train)
y_test_pred[msk_jets_test[idx]] = predict_labels(weights, phi_test)
# compute accuracy for train and test data
acc_train = compute_accuracy(y_train_pred, y_train_all_jets)
acc_test = compute_accuracy(y_test_pred, y_test_all_jets)
return acc_train, acc_test
# | 2.25 | 31.85 | -2.82901631903 | 0.0 |
# | 2.5 | 36.75 | -2.82901631903 | 0.0 |
# | 2.75 | 41.65 | -2.82901631903 | 0.0 |
# | 3.0 | 46.55 | -2.82901631903 | 0.0 |
# | 3.25 | 51.45 | -2.82901631903 | 0.0 |
# | 3.5 | 56.35 | -2.82901631903 | 0.0 |
#
# This data is currently saved in a file called `trajectory_example.pickle`. It can be loaded using a helper function we've provided (demonstrated below):
# In[1]:
from helpers import process_data
from math import cos, sin, pi
from matplotlib import pyplot as plt
data_list = process_data("trajectory_example.pickle")
for entry in data_list:
print(entry)
# as you can see, each entry in `data_list` contains four fields. Those fields correspond to `timestamp` (seconds), `displacement` (meters), `yaw_rate` (rads / sec), and `acceleration` (m/s/s).
#
# ### The Point of this Project!
# **Data tells a story but you have to know how to find it!**
#
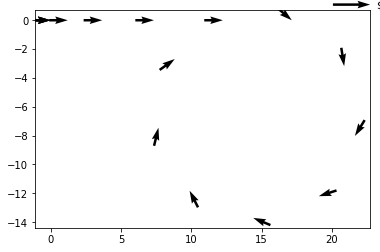
# Contained in the data above is all the information you need to reconstruct a fairly complex vehicle trajectory. After processing **this** exact data, it's possible to generate this plot of the vehicle's X and Y position:
#
# 
#
# as you can see, this vehicle first accelerates forwards and then turns right until it almost completes a full circle turn.
#
#!/usr/bin/env python
# coding: utf-8
# # Integrating Rate Gyro Data
# The **yaw rate** of a vehicle can be measured by a **rate gyro**.
#
# The yaw rate gives the rate of change of the vehicle's heading in radians per second and since a vehicle's heading is usually given by the greek letter $\theta$ (theta), yaw **rate** is given by $\dot{\theta}$ (theta dot).
#
# Integrating the yaw rate gives total change in heading.
# In[1]:
from helpers import process_data, get_derivative_from_data
from matplotlib import pyplot as plt
PARALLEL_PARK_DATA = process_data("parallel_park.pickle")
TIMESTAMPS = [row[0] for row in PARALLEL_PARK_DATA]
DISPLACEMENTS = [row[1] for row in PARALLEL_PARK_DATA]
YAW_RATES = [row[2] for row in PARALLEL_PARK_DATA]
ACCELERATIONS = [row[3] for row in PARALLEL_PARK_DATA]
# In[2]:
plt.title("Yaw Rate vs Time")
plt.xlabel("Time (seconds)")
plt.ylabel("Yaw Rate (radians / second)")
plt.plot(TIMESTAMPS, YAW_RATES)
plt.show()
# Here's what I make of this data
def api():
data = request.args.get('data', "")
process_data(data)
return jsonify({'success': True})
from helpers import process_data
import numpy as np
from math import cos, sin
from matplotlib import pyplot as plt
# %matplotlib inline
data_list = process_data("trajectory_example.pickle")
for entry in data_list:
print(entry)
def get_speeds(data_list):
displacement_previous = 0.0
time_previous = 0.0
speeds = [0.0]
for i in range(1, len(data_list)):
displacement = data_list[i][1]
time = data_list[i][0]
delta_displacement = displacement - displacement_previous
delta_time = time - time_previous
speed = delta_displacement / delta_time
speeds.append(speed)
displacement_previous = displacement
time_previous = time
return speeds
from scipy import stats as stat
import pickle as pk
import os
import sys
sys.path.insert(1, os.path.join(sys.path[0], '../util'))
import helpers
import mcmcse
sys.path.insert(1, os.path.join(sys.path[0], '../mcmc_sampler'))
from gibbs import gibbs
from metropolis_within_gibbs import metropolis_within_gibbs
sys.path.insert(1, os.path.join(sys.path[0], '../data_generation'))
from gaussian_mean_shift import generate_gaussian_mean_shift
import matplotlib.pyplot as plt
# params that won't change throughout
sd = 1
alpha = 1
beta = 1
rep = 1
i = np.array([0, 1, 2, 3, 4])
M = np.array([2, 2, 4, 4, 3])
n = np.array([50, 20000, 60, 100, 100])
n_MCMC = np.array([1, 3, 3, 3, 3])
for m in np.arange(M.shape[0]):
print(m)
for d in i:
print(d)
helpers.process_data(M[m], n[m], n_MCMC[m], 2, d)
from sklearn.metrics import accuracy_score, classification_report
from sklearn.metrics import auc, roc_curve, roc_auc_score
from sklearn.linear_model import LogisticRegression
from sklearn.ensemble import RandomForestClassifier
from xgboost import XGBClassifier as XGBClassifier
import statsmodels.api as statmod
from sklearn.pipeline import Pipeline
import warnings
warnings.filterwarnings("ignore")
if __name__ == "__main__":
# Import and Process data
# ==================================================
df_2019 = helpers.process_data(2019)
df_2018 = helpers.process_data(2018)
df_2017 = helpers.process_data(2017)
df_2017['gender_Prefer not to say'] = 0
df_2017 = df_2017.sort_index(axis=1) # sort column by column names
# Aggregating the repeated cross-sectional data
data = pd.concat([df_2019, df_2018, df_2017], axis=0)
# check for missing values
print(data.isnull().sum())
# For this notebook, I will only work with a much smaller subset of the dataset.
# I will randomly sample 20 k respondents and perform analysis and modelling.
data = data.sample(n=20000, random_state=10)
while True:
try:
set_mfc(r)
if r.get('mock') == b'on' and r.llen('mock_data') > 0:
while r.llen('mock_data') > 0:
data = r.rpop('mock_data')
data = json.loads(data)
data = process_mock_data(r, data)
print('Worker produce mock data', data)
if r.get('status') == b'run':
data = process_data(r, s)
print('System is running...', data)
if r.get('analyzing') == b'true':
if r.get('purging') == b'true':
set_valve(0)
else:
position = get_valve(r)
set_valve(position)
elif r.get('analyzing') == b'manual_valve':
position = get_valve(r)
set_valve(position)
else:
set_valve(-1)
r.set('valve', -1)
else:
turn_off_valves_mfc()
import solution
from helpers import process_data
from math import pi
T1 = process_data("trajectory_1.pickle")
T2 = process_data("trajectory_2.pickle")
T3 = process_data("trajectory_3.pickle")
def test_get_speeds(get_speeds_function):
#print(T1) # SW 20200407 DEBUG
student_speeds = get_speeds_function(T1)
correct_speeds = solution.get_speeds(T1)
if len(student_speeds) != len(correct_speeds):
print("Your get_speeds function returned a list of length")
print(len(student_speeds), "was expecting length", len(correct_speeds))
return
speed_diff_at_end = correct_speeds[-1] - student_speeds[-1]
pct_diff = abs(speed_diff_at_end / correct_speeds[-1]) * 100
if pct_diff > 5:
print("Your final speed for trajectory_1 was too far off. You said:")
print(student_speeds[-1], "but this was expected: ",
correct_speeds[-1])
return
print("PASSED test of get_speeds function!")
return
def test_get_x_y(get_x_y_function):